Qing Li - Real-Time Concepts for Embedded Systems
Здесь есть возможность читать онлайн «Qing Li - Real-Time Concepts for Embedded Systems» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: San Francisco, Год выпуска: 2003, ISBN: 2003, Издательство: CMP books, Жанр: ОС и Сети, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Real-Time Concepts for Embedded Systems
- Автор:
- Издательство:CMP books
- Жанр:
- Год:2003
- Город:San Francisco
- ISBN:1-57820-124-1
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Real-Time Concepts for Embedded Systems: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Real-Time Concepts for Embedded Systems»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Delve into the details of real-time programming so you can develop a working knowledge of the common design patterns and program structures of real-time operating systems (RTOS). The objects and services that are a part of most RTOS kernels are described and real-time system design is explored in detail. You learn how to decompose an application into units and how to combine these units with other objects and services to create standard building blocks. A rich set of ready-to-use, embedded design “building blocks” is also supplied to accelerate your development efforts and increase your productivity.
Experienced developers new to embedded systems and engineering or computer science students will both appreciate the careful balance between theory, illustrations, and practical discussions. Hard-won insights and experiences shed new light on application development, common design problems, and solutions in the embedded space. Technical managers active in software design reviews of real-time embedded systems will find this a valuable reference to the design and implementation phases.
Qing Li is a senior architect at Wind River Systems, Inc., and the lead architect of the company’s embedded IPv6 products. Qing holds four patents pending in the embedded kernel and networking protocol design areas. His 12+ years in engineering include expertise as a principal engineer designing and developing protocol stacks and embedded applications for the telecommunications and networks arena. Qing was one of a four-member Silicon Valley startup that designed and developed proprietary algorithms and applications for embedded biometric devices in the security industry.
Caroline Yao has more than 15 years of high tech experience ranging from development, project and product management, product marketing, business development, and strategic alliances. She is co-inventor of a pending patent and recently served as the director of partner solutions for Wind River Systems, Inc. About the Authors
Real-Time Concepts for Embedded Systems — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Real-Time Concepts for Embedded Systems», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
A reference to the newly created device entry is returned to the caller of the create function. Subsequent calls to the open and destroy functions use this reference.
12.4 Points to Remember
Some points to remember include the following:
· Interfaces between a device and the main processor occur in two ways: port mapped and memory mapped.
· DMA controllers allows data transfer bypassing the main processor.
· I/O subsystems must be flexible enough to handle a wide range of I/O devices.
· Uniform I/O hides device peculiarities from applications.
· The I/O subsystem maintains a driver table that associates uniform I/O calls with driver-specific I/O routines.
· The I/O subsystem maintains a device table and forms an association between this table and the driver table.
Chapter 13: Memory Management
13.1 Introduction
Embedded systems developers commonly implement custom memory-management facilities on top of what the underlying RTOS provides. Understanding memory management is therefore an important aspect of developing for embedded systems.
Knowing the capability of the memory management system can aid application design and help avoid pitfalls. For example, in many existing embedded applications, the dynamic memory allocation routine, malloc, is called often. It can create an undesirable side effect called memory fragmentation. This generic memory allocation routine, depending on its implementation, might impact an application's performance. In addition, it might not support the allocation behavior required by the application.
Many embedded devices (such as PDAs, cell phones, and digital cameras) have a limited number of applications (tasks) that can run in parallel at any given time, but these devices have small amounts of physical memory onboard. Larger embedded devices (such as network routers and web servers) have more physical memory installed, but these embedded systems also tend to operate in a more dynamic environment, therefore making more demands on memory. Regardless of the type of embedded system, the common requirements placed on a memory management system are minimal fragmentation, minimal management overhead, and deterministic allocation time.
This chapter focuses on:
· memory fragmentation and memory compaction,
· an example implementation of the malloc and free functions,
· fixed-size, pool-based memory management,
· blocking vs. non-blocking memory functions, and
· the hardware memory management unit (MMU).
13.2 Dynamic Memory Allocation in Embedded Systems
Chapter 3 shows that the program code, program data, and system stack occupy the physical memory after program initialization completes. Either the RTOS or the kernel typically uses the remaining physical memory for dynamic memory allocation. This memory area is called the heap. Memory management in the context of this chapter refers to the management of a contiguous block of physical memory, although the concepts introduced in this chapter apply to the management of non-contiguous memory blocks as well. These concepts also apply to the management of various types of physical memory. In general, a memory management facility maintains internal information for a heap in a reserved memory area called the control block . Typical internal information includes:
· the starting address of the physical memory block used for dynamic memory allocation,
· the overall size of this physical memory block, and
· the allocation table that indicates which memory areas are in use, which memory areas are free, and the size of each free region.
This chapter examines aspects of memory management through an example implementation of the malloc and free functions for an embedded system.
13.2.1 Memory Fragmentation and Compaction
In the example implementation, the heap is broken into small, fixed-size blocks. Each block has a unit size that is power of two to ease translating a requested size into the corresponding required number of units. In this example, the unit size is 32 bytes. The dynamic memory allocation function, malloc, has an input parameter that specifies the size of the allocation request in bytes. malloc allocates a larger block, which is made up of one or more of the smaller, fixed-size blocks. The size of this larger memory block is at least as large as the requested size; it is the closest to the multiple of the unit size. For example, if the allocation requests 100 bytes, the returned block has a size of 128 bytes (4 units x 32 bytes/unit). As a result, the requestor does not use 28 bytes of the allocated memory, which is called memory fragmentation. This specific form of fragmentation is called internal fragmentation because it is internal to the allocated block.
The allocation table can be represented as a bitmap, in which each bit represents a 32-byte unit. Figure 13.1 shows the states of the allocation table after a series of invocations of the malloc and free functions. In this example, the heap is 256 bytes.
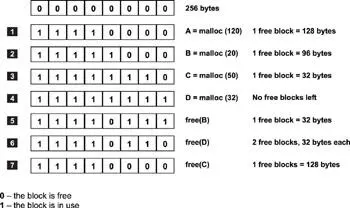
Figure 13.1: States of a memory allocation map.
Step 6 shows two free blocks of 32 bytes each. Step 7, instead of maintaining three separate free blocks, shows that all three blocks are combined to form a 128-byte block. Because these blocks have been combined, a future allocation request for 96 bytes should succeed.
Figure 13.2 shows another example of the state of an allocation table. Note that two free 32-byte blocks are shown. One block is at address 0x10080, and the other at address 0x101C0, which cannot be used for any memory allocation requests larger than 32 bytes. Because these isolated blocks do not contribute to the contiguous free space needed for a large allocation request, their existence makes it more likely that a large request will fail or take too long. The existence of these two trapped blocks is considered external fragmentation because the fragmentation exists in the table, not within the blocks themselves. One way to eliminate this type of fragmentation is to compact the area adjacent to these two blocks. The range of memory content from address 0x100A0 (immediately following the first free block) to address 0x101BF (immediately preceding the second free block is shifted 32 bytes lower in memory, to the new range of 0x10080 to 0x1019F, which effectively combines the two free blocks into one 64-byte block. This new free block is still considered memory fragmentation if future allocations are potentially larger than 64 bytes. Therefore, memory compaction continues until all of the free blocks are combined into one large chunk.
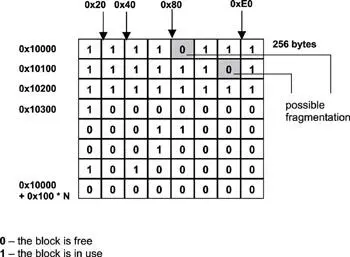
Figure 13.2: Memory allocation map with possible fragmentation.
Several problems occur with memory compaction. It is time-consuming to transfer memory content from one location to another. The cost of the copy operation depends on the length of the contiguous blocks in use. The tasks that currently hold ownership of those memory blocks are prevented from accessing the contents of those memory locations until the transfer operation completes. Memory compaction is almost never done in practice in embedded designs. The free memory blocks are combined only if they are immediate neighbors, as illustrated in Figure 13.1.
Memory compaction is allowed if the tasks that own those memory blocks reference the blocks using virtual addresses. Memory compaction is not permitted if tasks hold physical addresses to the allocated memory blocks.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Real-Time Concepts for Embedded Systems»
Представляем Вашему вниманию похожие книги на «Real-Time Concepts for Embedded Systems» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.








Обсуждение, отзывы о книге «Real-Time Concepts for Embedded Systems» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.