Qing Li - Real-Time Concepts for Embedded Systems
Здесь есть возможность читать онлайн «Qing Li - Real-Time Concepts for Embedded Systems» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: San Francisco, Год выпуска: 2003, ISBN: 2003, Издательство: CMP books, Жанр: ОС и Сети, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Real-Time Concepts for Embedded Systems
- Автор:
- Издательство:CMP books
- Жанр:
- Год:2003
- Город:San Francisco
- ISBN:1-57820-124-1
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Real-Time Concepts for Embedded Systems: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Real-Time Concepts for Embedded Systems»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Delve into the details of real-time programming so you can develop a working knowledge of the common design patterns and program structures of real-time operating systems (RTOS). The objects and services that are a part of most RTOS kernels are described and real-time system design is explored in detail. You learn how to decompose an application into units and how to combine these units with other objects and services to create standard building blocks. A rich set of ready-to-use, embedded design “building blocks” is also supplied to accelerate your development efforts and increase your productivity.
Experienced developers new to embedded systems and engineering or computer science students will both appreciate the careful balance between theory, illustrations, and practical discussions. Hard-won insights and experiences shed new light on application development, common design problems, and solutions in the embedded space. Technical managers active in software design reviews of real-time embedded systems will find this a valuable reference to the design and implementation phases.
Qing Li is a senior architect at Wind River Systems, Inc., and the lead architect of the company’s embedded IPv6 products. Qing holds four patents pending in the embedded kernel and networking protocol design areas. His 12+ years in engineering include expertise as a principal engineer designing and developing protocol stacks and embedded applications for the telecommunications and networks arena. Qing was one of a four-member Silicon Valley startup that designed and developed proprietary algorithms and applications for embedded biometric devices in the security industry.
Caroline Yao has more than 15 years of high tech experience ranging from development, project and product management, product marketing, business development, and strategic alliances. She is co-inventor of a pending patent and recently served as the director of partner solutions for Wind River Systems, Inc. About the Authors
Real-Time Concepts for Embedded Systems — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Real-Time Concepts for Embedded Systems», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
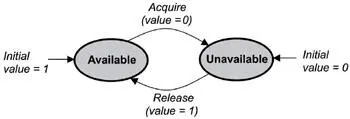
Figure 6.2: The state diagram of a binary semaphore.
Binary semaphores are treated as global resources , which means they are shared among all tasks that need them. Making the semaphore a global resource allows any task to release it, even if the task did not initially acquire it.
6.2.2 Counting Semaphores
A counting semaphore uses a count to allow it to be acquired or released multiple times. When creating a counting semaphore, assign the semaphore a count that denotes the number of semaphore tokens it has initially. If the initial count is 0, the counting semaphore is created in the unavailable state. If the count is greater than 0, the semaphore is created in the available state, and the number of tokens it has equals its count, as shown in Figure 6.3.
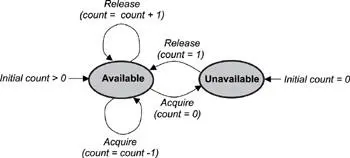
Figure 6.3: The state diagram of a counting semaphore.
One or more tasks can continue to acquire a token from the counting semaphore until no tokens are left. When all the tokens are gone, the count equals 0, and the counting semaphore moves from the available state to the unavailable state. To move from the unavailable state back to the available state, a semaphore token must be released by any task.
Note that, as with binary semaphores, counting semaphores are global resources that can be shared by all tasks that need them. This feature allows any task to release a counting semaphore token. Each release operation increments the count by one, even if the task making this call did not acquire a token in the first place.
Some implementations of counting semaphores might allow the count to be bounded. A bounded count is a count in which the initial count set for the counting semaphore, determined when the semaphore was first created, acts as the maximum count for the semaphore. An unbounded count allows the counting semaphore to count beyond the initial count to the maximum value that can be held by the count’s data type (e.g., an unsigned integer or an unsigned long value).
6.2.3 Mutual Exclusion (Mutex) Semaphores
A mutual exclusion (mutex) semaphore is a special binary semaphore that supports ownership, recursive access, task deletion safety, and one or more protocols for avoiding problems inherent to mutual exclusion. Figure 6.4 illustrates the state diagram of a mutex.
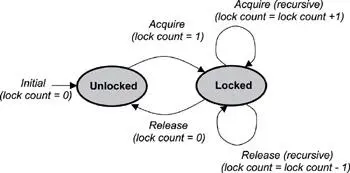
Figure 6.4: The state diagram of a mutual exclusion (mutex) semaphore.
As opposed to the available and unavailable states in binary and counting semaphores, the states of a mutex are unlocked or locked (0 or 1, respectively). A mutex is initially created in the unlocked state, in which it can be acquired by a task. After being acquired, the mutex moves to the locked state. Conversely, when the task releases the mutex, the mutex returns to the unlocked state. Note that some kernels might use the terms lock and unlock for a mutex instead of acquire and release .
Depending on the implementation, a mutex can support additional features not found in binary or counting semaphores. These key differentiating features include ownership, recursive locking, task deletion safety, and priority inversion avoidance protocols.
Ownership of a mutex is gained when a task first locks the mutex by acquiring it. Conversely, a task loses ownership of the mutex when it unlocks it by releasing it. When a task owns the mutex, it is not possible for any other task to lock or unlock that mutex. Contrast this concept with the binary semaphore, which can be released by any task, even a task that did not originally acquire the semaphore.
Many mutex implementations also support recursive locking , which allows the task that owns the mutex to acquire it multiple times in the locked state. Depending on the implementation, recursion within a mutex can be automatically built into the mutex, or it might need to be enabled explicitly when the mutex is first created.
The mutex with recursive locking is called a recursive mutex . This type of mutex is most useful when a task requiring exclusive access to a shared resource calls one or more routines that also require access to the same resource. A recursive mutex allows nested attempts to lock the mutex to succeed, rather than cause deadlock , which is a condition in which two or more tasks are blocked and are waiting on mutually locked resources. The problem of recursion and deadlocks is discussed later in this chapter, as well as later in this book.
As shown in Figure 6.4, when a recursive mutex is first locked, the kernel registers the task that locked it as the owner of the mutex. On successive attempts, the kernel uses an internal lock count associated with the mutex to track the number of times that the task currently owning the mutex has recursively acquired it. To properly unlock the mutex, it must be released the same number of times.
In this example, a lock count tracks the two states of a mutex (0 for unlocked and 1 for locked), as well as the number of times it has been recursively locked (lock count › 1). In other implementations, a mutex might maintain two counts: a binary value to track its state, and a separate lock count to track the number of times it has been acquired in the lock state by the task that owns it.
Do not confuse the counting facility for a locked mutex with the counting facility for a counting semaphore. The count used for the mutex tracks the number of times that the task owning the mutex has locked or unlocked the mutex. The count used for the counting semaphore tracks the number of tokens that have been acquired or released by any task. Additionally, the count for the mutex is always unbounded, which allows multiple recursive accesses.
Some mutex implementations also have built-in task deletion safety . Premature task deletion is avoided by using task deletion locks when a task locks and unlocks a mutex. Enabling this capability within a mutex ensures that while a task owns the mutex, the task cannot be deleted. Typically protection from premature deletion is enabled by setting the appropriate initialization options when creating the mutex.
Priority inversion commonly happens in poorly designed real-time embedded applications. Priority inversion occurs when a higher priority task is blocked and is waiting for a resource being used by a lower priority task, which has itself been preempted by an unrelated medium-priority task. In this situation, the higher priority task’s priority level has effectively been inverted to the lower priority task’s level.
Enabling certain protocols that are typically built into mutexes can help avoid priority inversion. Two common protocols used for avoiding priority inversion include:
· priority inheritance protocol-ensures that the priority level of the lower priority task that has acquired the mutex is raised to that of the higher priority task that has requested the mutex when inversion happens. The priority of the raised task is lowered to its original value after the task releases the mutex that the higher priority task requires.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Real-Time Concepts for Embedded Systems»
Представляем Вашему вниманию похожие книги на «Real-Time Concepts for Embedded Systems» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.








Обсуждение, отзывы о книге «Real-Time Concepts for Embedded Systems» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.