Saeid Sanei - Body Sensor Networking, Design and Algorithms
Здесь есть возможность читать онлайн «Saeid Sanei - Body Sensor Networking, Design and Algorithms» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: unrecognised, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Body Sensor Networking, Design and Algorithms
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Body Sensor Networking, Design and Algorithms: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Body Sensor Networking, Design and Algorithms»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
, professionals in the field of Biomedical Engineering and e-health get an in-depth look at advancements, changes, and developments. When it comes to advances in the industry, the text looks at cooperative networks, noninvasive and implantable sensor microelectronics, wireless sensor networks, platforms, and optimization—to name a few.
Each chapter provides essential information needed to understand the current landscape of technology and mechanical developments. It covers subjects including Physiological Sensors, Sleep Stage Classification, Contactless Monitoring, and much more.
Among the many topics covered, the text also includes additions such as:
● Over 120 figures, charts, and tables to assist with the understanding of complex topics
● Design examples and detailed experimental works
● A companion website featuring MATLAB and selected data sets
Additionally, readers will learn about wearable and implantable devices, invasive and noninvasive monitoring, biocompatibility, and the tools and platforms for long-term, low-power deployment of wireless communications. It’s an essential resource for understanding the applications and practical implementation of BSN when it comes to elderly care, how to manage patients with chronic illnesses and diseases, and use cases for rehabilitation.
Body Sensor Networking, Design and Algorithms — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Body Sensor Networking, Design and Algorithms», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
The use of accelerometry for gait analysis has been significantly increased due to their ease of use, portability, compatibility, and the capability to be integrated into low-powered wireless embedded platforms. However, in addition to accelerometers, there are other popular existing wearable technologies for gait analysis which are briefly described here.
3.2.2 Gyroscope and IMU
The gyroscope is arguably the next most commonly used motion detector after the accelerometer. It can be attached to the feet to measure the angular velocity of the foot for detecting different gait phases [28]. The MEMS technology used in accelerometers is used to drive down the cost of gyroscopes, so they are often featured alongside accelerometers in many devices and in IMUs. In contrast to accelerometers, which can directly measure linear acceleration, gyroscopes measure the angular movement about a given axis.
Accelerometers by themselves can measure angular rotation but they cannot give as good a result as gyroscopes, as shown in [29]. Thus, the gyroscope can be used to correct the accelerometer readings, or have its output fused with those of accelerometer when deployed together, such as in an IMU.
The miniaturisation technologies for fibre optic and MEMS progresses quickly. Except for gyroscopes working on optical principles, what the other types have in common is a mass that is constantly moving within the device in order to measure the angular motion. This motion causes the gyroscope to consume more current than an accelerometer. An example of MEMS gyroscope technology is that based on Coriolis acceleration [30]. As opposed to centrifugal acceleration, which is always present in rotation, Coriolis acceleration occurs whenever there is motion along the radius of the rotation.
Figure 3.3shows the schematic of a single axis of a gyroscope which rotates clockwise, together with its semiconductor substrate. The gyroscope has capacitive fingers fabricated as part of its structure [20]. To this substrate a frame with a set of capacitive fingers is tethered with springs. In addition, a mass, also tethered to this frame with springs, is driven into mechanical resonance and constrained to move in one direction. On the left of the figure, the mass is considered as it moves to the top of the figure along the radius of rotation. The Coriolis force acts on the frame, which deflects to the left as shown. On the right of the figure, as the mass resonates it moves to the bottom of the figure; in this case the Coriolis force causes a deflection to the right. The varying distance between the capacitive fingers is picked up as a voltage representing a measure of the angular speed. From [29], it can be shown that the displacement of the frame relative to the substrate is [20]:
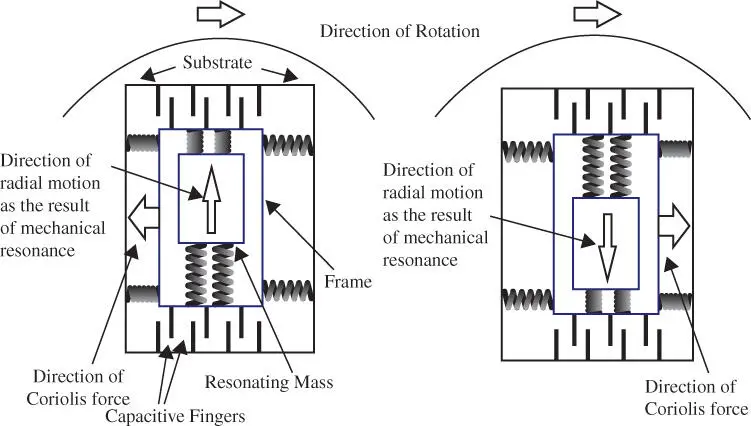
Figure 3.3 A simple diagram of a gyroscope rotating clockwise. On the left, resonating mass is moving upwards, whereas, on the right, it is moving downwards. Direction of Coriolis force is also shown [20].
Source: Courtesy of Jarchi, D., Pope, J., Lee, T.K.M., Tamjidi, L., Mirzaei, A. and Sanei, S.

where Ωis the angular velocity of the gyroscope (towards the right) and vthe velocity of the resonating mass along the radius of rotation, M is mass, k is the spring constant of the frame-substrate springs. By driving the resonating mass at a known frequency, its changing displacement Dinduces a voltage from which the angular speed can be derived reasonably linearly. However, as with MEMS devices, the problems of drift, noise, and other artefacts remain. An IMU can be a combination of both accelerometers and gyroscopes (and a magnetometer in a 9D version) that measures rate, angle, and direction of motion. IMUs can be attached to any part of the body and are effectively used in gait analysis. Recent IMUs have built-in magnetometers as well that sense gravity and can be used in fall detection.
3.2.3 Force Plates
Force plates measure vertical ground reaction forces (GRFs) applied by gait during walking. A force platform can be integrated under the moving belt of a treadmill or under the entire treadmill [31]. Force platforms are expensive and have some limitations as the plates are installed within a short space and need to remain stationary. These make their applications in free space difficult. Nevertheless, there are force or pressure sensors that can be accommodated inside or under shoes to monitor the walking steps of humans or help correct the posture of athletes.
3.2.4 Goniometer
A goniometer is used to track the angle changes and is used for angle measurement in gait analysis since it is flexible and can rotate proportionally to the joint angle being measured [32]. It is particularly useful for the analysis of ranges of motion. Using a goniometer, it is possible to determine the range of knee joint angular movement to monitor patients with knee injuries. An optical fibre-based goniometer has been introduced in [33].
3.2.5 Electromyography
Electromyography (EMG) is used to measure both physical (such as gait) and physiological activities (such as muscle diseases), as can be seen in Section 3.3. It represents the electrical potentials of neurons within the muscles and can be recorded using surface electrodes or by wires or needles inserted into the selected muscle of a lower extremity [34]. An understanding of muscle activity in gait can be obtained by processing the EMG signals. EMG provides feasibility of analysing relative contribution of the superficial muscles during movement. It records the activity of underlying motor units and plays an important role in clinical gait analysis for assessing walking performance of the people with gait impairments using muscle activity information, such as timing of the muscle activity and muscle strength.
3.2.6 Sensing Fabric
The goal in sensing fabric-based technology is the integration of sensors, communication components, and the processing elements into the fabric. The most common types are pressure sensors, including piezoelectric, piezoresistive, resistive, and capacitive sensors [35]. These sensors can be networked in a carpet to record the step pressure from both feet. In a more useful design, however, the pressure sensors and their associated electronics and wireless communication system, which does fit completely inside the shoe, is very demanding for the long-term monitoring and recordings of daily activities. Therefore, to make a valuable gait analysis platform, the sensing fabric technology has been directed towards the development of pressure-sensitive foot insoles with wireless communication capability [36].
3.3 Physiological Sensors
These sensors sense and capture the information emitted from the body inherently due to physiological or metabolic changes. These can be due to normal or abnormal human states. They can also be due to external effects such as viewing intriguing scenes, temperature change, and various physical activities.
3.3.1 Multichannel Measurement of the Nerves Electric Potentials
Electroencephalography (EEG), EMG, and electrocardiography (ECG) are probably the most common types of physiological measurement systems. They are widely available in the related clinical departments. In terms of operations, they measure, respectively, the electrical activities of nerves in the brain, muscles, and heart. Technically, low-noise differential amplifiers, with high amplification gains and large input impedance, are used to capture tiny variations in the voltage between each two electrodes or with respect to a common reference over the body. A typical three-stage differential amplifier is depicted in Section 3.5. Fundamental electronic components, such as operational amplifiers, resistors, capacitors, and diodes, are used to make this device. EEG and ECG (or even EMG) often involve a large number of channels. Nevertheless, due to their low bandwidth, the signals are often sampled in a low rate, which makes their real-time processing possible ( Figure 3.4).
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Body Sensor Networking, Design and Algorithms»
Представляем Вашему вниманию похожие книги на «Body Sensor Networking, Design and Algorithms» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.










Обсуждение, отзывы о книге «Body Sensor Networking, Design and Algorithms» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.