George F. Elmasry - Dynamic Spectrum Access Decisions
Здесь есть возможность читать онлайн «George F. Elmasry - Dynamic Spectrum Access Decisions» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: unrecognised, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Dynamic Spectrum Access Decisions
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:3 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Dynamic Spectrum Access Decisions: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Dynamic Spectrum Access Decisions»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
dynamic spectrum access approach using the latest applications and techniques
Dynamic Spectrum Access Decisions: Local, Distributed, Centralized and Hybrid Designs Dynamic Spectrum Access Decisions · Licensed spectrum bands
· Unlicensed spectrum bands
· Civilian communications
· Military communications
Consisting of a set of techniques derived from network information theory and game theory, DSA improves the performance of communications networks. This book addresses advanced topics in this area and assumes basic knowledge of wireless communications.
Dynamic Spectrum Access Decisions — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Dynamic Spectrum Access Decisions», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
2.4.4 Frequency Hopping Spectrum Sensing
An example of frequency hopping spread spectrum is illustrated in Figure 2.12, where three hops can occur during the modulation duration time, T s, of a single symbol. In reality, defense signals tend to create fast hopping such that T sis as small as possible.
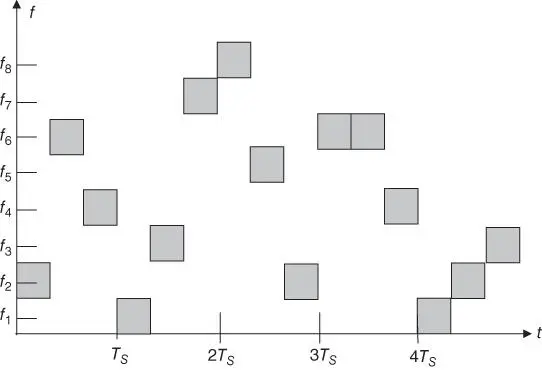
Figure 2.12Fast hopping where three hops occur during the modulation of one symbol.
With frequency hopping spread spectrum, both the hopping pattern and the chip code vectors are not known to an external spectrum sensor. External commercial spectrum sensors that sense a military signal should rely on spectrum sensing techniques that do not utilize frequency hopping and spread spectrum detection (i.e., not attempt to find the spreading code and the hopping pattern of the military signal). A benign method could be simple energy detection. In defense applications, a spectrum sensor can detect the presence of a malicious signal that attempts to jam the used defense signal through different means, including jamming a subset of the frequency slots ( f 1− f 8in Figure 2.12) continually. 14This type of spectrum sensing is performed by the military system to overcome malicious jammers when the defense application signal is not a secondary user.
2.4.5 Orthogonality Based Spectrum Sensing
This type of spectrum sensing is common among cooperative spectrum users of the same signal. With orthogonal spectrum sensing, the decision‐making entity can be distributed, centralized or hybrid, as introduced in Chapter 1. The centralized decision‐making entity is sometimes referred to as the decision fusion center (DFC). The decision‐making process attempts to exploit signal orthogonality for cooperative spectrum use while mitigating the effect of fading, shadowing, out‐of‐range, and other factors that can increase the probability of false alarm and the probability of misdetection.
Orthogonal cooperative spectrum sensing communications systems have to take into consideration the use of multiple‐input multiple‐output (MIMO) antennas where multipath fading is a critical factor. Some implementations of this spectrum sensing technique use a hybrid approach between a local, distributed, and centralized decision‐making processes. In a typical system, referred to as the standard centralized fusion model, each node transmits its local decision outcome to a centralized DFC or a peer node. Spectrum sensing traffic, which include this reporting of node decision, can use a standalone channel known as parallel access channel (PAC) or can use one of the orthogonal signal multiple access channels (MACs). Reporting to peer nodes can use a separate channel from reporting to a centralized DFC, which is often referred to as the cooperative channel. Figure 2.13shows three types of channels: (i) the sensed communications channel indicated by the thick lines; (ii) the reporting channel to the centralized DFC indicated by the thin lines; and (iii) the cooperative channel for peer‐to‐peer reporting of spectrum sensing decisions indicated by the dashed lines.
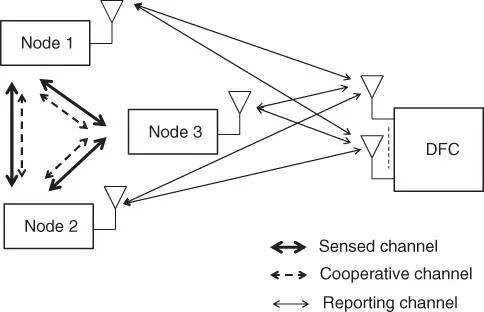
Figure 2.13Cooperative spectrum sensing with MIMO DFC.
Notice in Figure 2.13that all the nodes can have MIMO antennas (not just the DFC centralized entity). This model can work with a single‐input single‐output antenna for each node or a MIMO for each node. In either case, the centralized location must have a massive MIMO antenna in order to account for multipath fading.
With this cooperative mode, the ROC decision‐making process explained in the next chapter is altered to a complementary receiving operating characteristics (CROC) decision‐making process, which takes into consideration the difference in spectral efficiency.
2.4.6 Waveform Based Spectrum Sensing
This spectrum sensing approach relies on pre‐knowledge of the signal to be sensed. Some commercial wireless signals use known synchronization patterns to align the receiving node processing to the received signal. These patterns can be exploited by the spectrum sensor to hypothesize the presence of the sensed signal. Signal synchronization patterns can include preambles, mid‐ambles, regularly transmitted pilot patterns, spreading sequences, 15etc. 16These patterns allow the spectrum sensor to correlate the received signal with a known copy of itself (it is essentially a form of coherent detection). This correlation process leads to a spectrum sensing result that outperforms energy detector based sensing. The reliability of the correlation process increases when the known signal length increases. Waveform‐based detection is used with known signals such as IEEE 802.11 signals.
While the autocorrelation based signal detection explained in Section 2.4.2can be influenced by noise and the time lag between the samples, waveform based spectrum sensing is only affected by the presence of noise as the signal patterns align with the correlation process. Chapter 3 shows how the decision‐making process of waveform based spectrum sensing may differ from that of simple energy detection spectrum sensing.
2.4.7 Cyclostationarity Based Spectrum Sensing
With some commercial OFDM signals, waveforms are altered by the transmitter to add signatures in the form of cycle frequencies at certain frequencies. These signatures can increase the robustness against multipath fading. Spectrum sensors can leverage these features for signal sensing. These signatures introduce periodicity features. The introduced cyclic frequencies and the periodicity make the signal cyclostationary. Cyclostationary signals follow a spectral density (cyclic spectral density function, CSDF) that is leveraged by the detection process and is used to differentiate noise from the sensed signal. This differentiation happens because the modulated signal has cyclostationary characteristics while the noise has wide‐sense stationary characteristics with no correlation. Cyclostationarity characteristics can also be used for distinguishing among different types of sensed signal.
Chapter 3 shows a type of cyclic autocorrelation function used with same‐channel in‐band signal sensing which estimates the noise spectral density separate from estimating the in‐band signal spectral density.
2.5 Euclidean Space Based Detection
As explained in Chapter 1, DSA involves many factors other than spectrum sensing. When propagating spectrum sensing information to peer nodes or to a centralized location, the geolocations of the sensors must be attached to the spectrum sensing information. This allows a distributed or a centralized DSA process that fuses spectrum sensing information from different sensors to create a comprehensive view of spectrum use (spectrum map) in a given area of operation. 17This comprehensive view can find each sensed signal's area of coverage (AOC) to create spectrum opportunities based on locations as well as find directional beams that can show more spatial opportunistic use.
2.5.1 Geographical Space Detection
When spectrum sensing information is propagated with location information defined by the sensor's latitude, longitude, and elevation, the fused information can create more spectrum use opportunities. The fusion process can show how at any given time, spectrum opportunity can be available in some parts of the area of operation while being fully occupied in other parts. The geographical space dimension helps the fusion process estimate propagation loss (path loss) in space to further ensure that spectrum reuse will not interfere with the sensed signals. Figure 2.14shows an example of geographical separation creating opportunistic spectrum use in the case of a secondary user opportunistically using a primary user's spectrum. Figure 2.15illustrates the case of a set of heterogeneous MANETs where DSA allows them to cooperatively and dynamically share a set of frequency bands ( f 1, f 2, and f 3) and an area of operation indicated by the dashed rectangle while avoiding interference. Notice that the illustration in Figure 2.15differs from dynamic use of frequency slots within a single network. With Figure 2.15, a centralized entity may be utilized to fuse spectrum sensing information collected from sensors dispersed geographically through the area of operation to dynamically use a set of predefined frequency bands.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Dynamic Spectrum Access Decisions»
Представляем Вашему вниманию похожие книги на «Dynamic Spectrum Access Decisions» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.







Обсуждение, отзывы о книге «Dynamic Spectrum Access Decisions» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.