Position, Navigation, and Timing Technologies in the 21st Century
Здесь есть возможность читать онлайн «Position, Navigation, and Timing Technologies in the 21st Century» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: unrecognised, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Position, Navigation, and Timing Technologies in the 21st Century
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Position, Navigation, and Timing Technologies in the 21st Century: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Position, Navigation, and Timing Technologies in the 21st Century»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Volume 1 of
contains three parts and focuses on the satellite navigation systems, technologies, and engineering and scientific applications. It starts with a historical perspective of GPS development and other related PNT development. Current global and regional navigation satellite systems (GNSS and RNSS), their inter-operability, signal quality monitoring, satellite orbit and time synchronization, and ground- and satellite-based augmentation systems are examined. Recent progresses in satellite navigation receiver technologies and challenges for operations in multipath-rich urban environment, in handling spoofing and interference, and in ensuring PNT integrity are addressed. A section on satellite navigation for engineering and scientific applications finishes off the volume.
Volume 2 of
consists of three parts and addresses PNT using alternative signals and sensors and integrated PNT technologies for consumer and commercial applications. It looks at PNT using various radio signals-of-opportunity, atomic clock, optical, laser, magnetic field, celestial, MEMS and inertial sensors, as well as the concept of navigation from Low-Earth Orbiting (LEO) satellites. GNSS-INS integration, neuroscience of navigation, and animal navigation are also covered. The volume finishes off with a collection of work on contemporary PNT applications such as survey and mobile mapping, precision agriculture, wearable systems, automated driving, train control, commercial unmanned aircraft systems, aviation, and navigation in the unique Arctic environment.
In addition, this text:
Serves as a complete reference and handbook for professionals and students interested in the broad range of PNT subjects Includes chapters that focus on the latest developments in GNSS and other navigation sensors, techniques, and applications Illustrates interconnecting relationships between various types of technologies in order to assure more protected, tough, and accurate PNT
will appeal to all industry professionals, researchers, and academics involved with the science, engineering, and applications of position, navigation, and timing technologies.pnt21book.com
Position, Navigation, and Timing Technologies in the 21st Century — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Position, Navigation, and Timing Technologies in the 21st Century», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
The first sample is set to be zero for the receiver clock, which differs from the transmitter time by an offset, denoted by t 0. As a result, the TOA can be expressed in terms of the correlation peak locations as
(40.2) 
where t 0is different for each transmitter using an independent clock.
If we calculate the pseudorange for and at each time of arrival TOA n, the measurements will not be on a uniform scale due to the random nature of the TOA caused by relative movement and noise. Hence, they are called aperiodic pseudoranges, denoted by APR n, and given by
(40.3) 
The time of measurement for the aperiodic pseudoranges is the same as the TOA. But aperiodic pseudoranges are not available regularly on a uniform time scale. In order to integrate these pseudoranges with other sensor measurements, interpolation may be required. Alternatively, we can form periodic pseudoranges [23].
In addition to the initial clock offset t 0, the clocks may drift in frequency, leading to T fieldand N s(the number of samples per field) off their nominal values. For the stationary transmitter and receiver, there is no Doppler frequency shift. The changes in symbol rate and sampling rate are due to the clock frequency instability, and the combined effect is observed at the receiver.
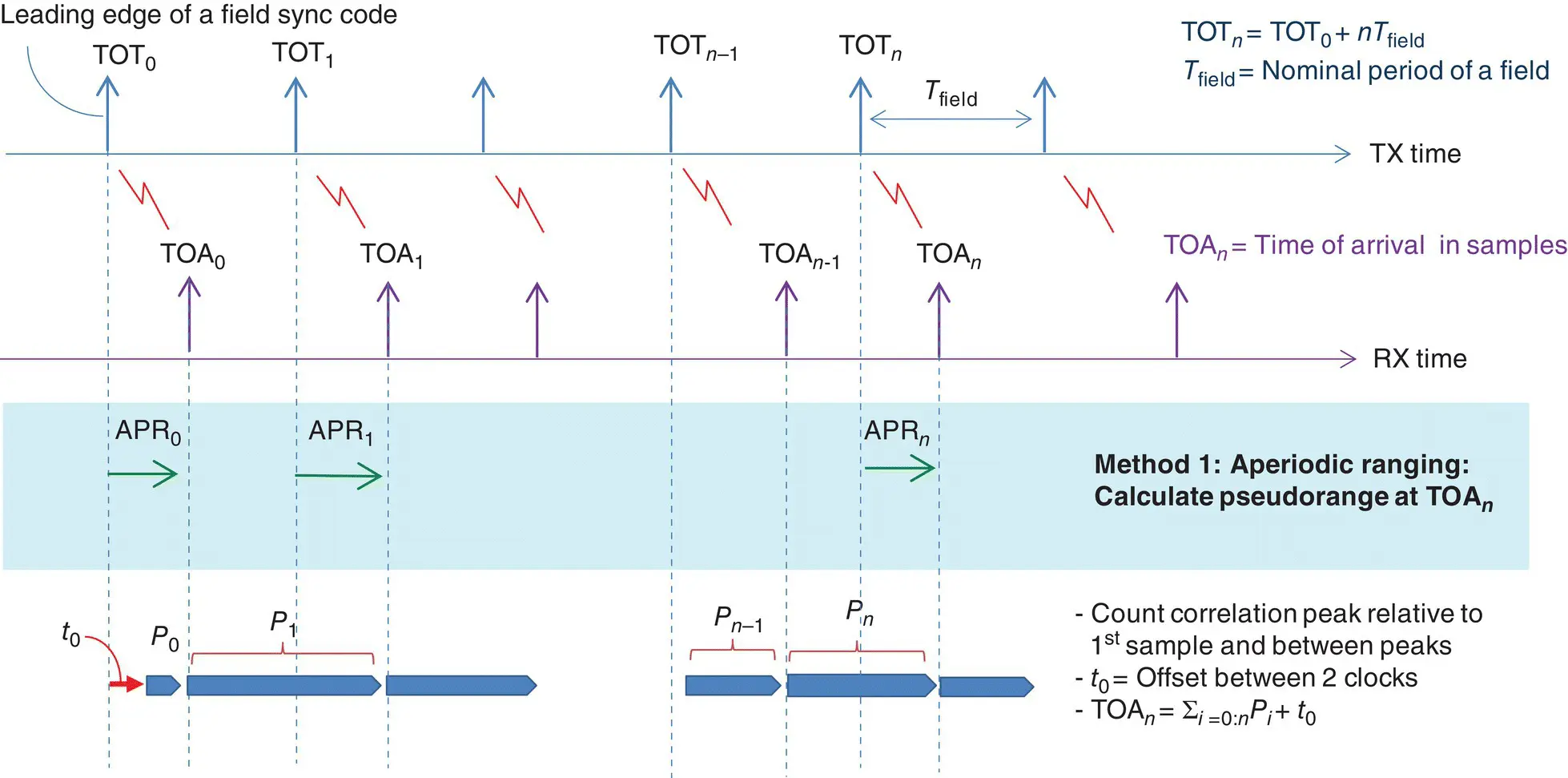
Figure 40.16 Relationship of timelines at transmitter and receiver and aperiodic pseudoranges.
For asynchronous transmitters, each pseudorange equation contains at least an unknown of its own related to the transmitter (i.e. the initial clock offset t 0). No instantaneous position fixing is possible with such pseudorange measurements for a stand‐alone solution unless additional information such as TOT and LOT is encoded on broadcasting signals (add‐on services). Nevertheless, there are different positioning mechanisms that can be employed to deal with the unknowns in pseudoranges, including differential ranging, relative ranging, and self‐calibration, among others.
Differential ranging involves a reference receiver at a known location that provides an estimate of the TOT or TOA of the same event via a data link to a user in order to cancel out the common TOT at the user receiver, leading to spatial difference of pseudoranges [7, 19, 20]. Relative ranging accumulates changes in range to a transmitter from a starting location [25]. As long as the signal tracking is maintained, the displacement from the starting point can be estimated from the temporal differences of pseudoranges to several transmitters in a process known as radio dead reckoning [23, 24, 82]. If the transmitter locations are known and the receiver starts from a known initial location, the method of self‐calibration can be used to estimate the unknown TOT [17].
As an example, consider the case of self‐calibration with an aperiodic pseudorange ( Eq. 40.3). We first form the range between a known transmitter and our receiver at the initial known location as APR n, and count the samples between successive correlation peaks P n. Since we do not know t 0and T field(except its nominal value), we can reformulate Eq. 40.3as
(40.4) 
Assume that the receiver is stationary (or its location known if it is moving). We collect N +1 measurements of APR n= APR and P nand obtain the following matrix equation:
(40.5) 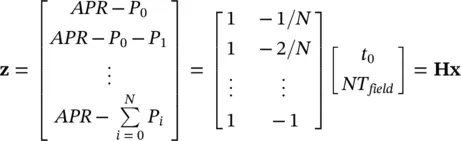
The least squares solution applied to Eq. 40.5gives
(40.6a) 
(40.6b) 
(40.6c) 
Note that due to the transmitter clock frequency instability, the actual field period may differ from the nominal one, which is thus estimated as part of the calibration process. In Eqs. 40.5and 40.6c, the scaling by the number of measurements N is to ensure numerical stability of the solution when N becomes very large. Similar equations can be formulated for periodic pseudoranges [23].
Two field test examples with ATSC‐8VSB [23, 29] and one example with DVB‐T [9] are presented next. The test environment with ATSC‐8VSB signals is in the San Francisco Bay area shown on Google Earth in Figure 40.17. The test site is in Foster City; DTV transmitters are located around the Bay at Sutro Tower, Mount San Bruno, Monument Peak, and Mount Allison, respectively; and one CDMA cell tower is along SR92 near the San Mateo Bridge across the Bay. The first test example with ATSC‐8VSB shows the effect of fast fading on mobile ranging, and the second test shows the effect of clock errors on the range bias and their possible calibration.
Mobile Test 1: Slow and Fast Fading.Severe Rayleigh fading occurs for mobile users in urban environments [42, 83], creating “holes” in data streams, which cannot be easily corrected by conventional coding schemes. Only 1 out of 313 segments per data field (about 24 ms) contains pseudorandom (PN) codes that can be used for timing and ranging. Such a low‐duty cycle (0.3%) requires specially designed correlators and code tracking loops for mobile users, particularly when low‐quality clocks are used in both transmitters and receivers. Although subject to Rayleigh fading, tracking of the PN codes is less devastating for DTV‐based ranging than for DTV viewing. In the latter case, interruption prevents continuous reception of ATSC‐8VSB signals, and the picture quality becomes unacceptable to mobile users. In ranging, however, agile acquisition and reacquisition schemes can coast through the “holes” with instantaneous recovery after complete signal losses.
A mobile test was designed and conducted to help better understand mobile fading and its effect on our software DTV receiver. On the roof and sides of a minivan, we placed seven magnetic‐mounted antennas and connected to seven radio channels (Ch1–Ch7) of our data acquisition system. As shown in Figures 40.18(a) and (b), a small patch antenna, marked “1,” is connected to Ch1 for GPS. A whip antenna, marked “2,” is connected to Ch2. The remaining five antennas, marked “3” through “7,” are identical and are connected to Ch3 through Ch7, respectively. Ant3 is placed in the middle section on the right‐hand side (the passenger side), while Ant4 is placed horizontally above the right rear wheel. Ant5 repeats the placement of Ant3 but on the left‐hand side (the driver side). Ant6 is similar to Ant4, but placed far to the left. Ant7 is in the middle on the back.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Position, Navigation, and Timing Technologies in the 21st Century»
Представляем Вашему вниманию похожие книги на «Position, Navigation, and Timing Technologies in the 21st Century» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.











Обсуждение, отзывы о книге «Position, Navigation, and Timing Technologies in the 21st Century» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.