Position, Navigation, and Timing Technologies in the 21st Century
Здесь есть возможность читать онлайн «Position, Navigation, and Timing Technologies in the 21st Century» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: unrecognised, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Position, Navigation, and Timing Technologies in the 21st Century
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Position, Navigation, and Timing Technologies in the 21st Century: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Position, Navigation, and Timing Technologies in the 21st Century»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Volume 1 of
contains three parts and focuses on the satellite navigation systems, technologies, and engineering and scientific applications. It starts with a historical perspective of GPS development and other related PNT development. Current global and regional navigation satellite systems (GNSS and RNSS), their inter-operability, signal quality monitoring, satellite orbit and time synchronization, and ground- and satellite-based augmentation systems are examined. Recent progresses in satellite navigation receiver technologies and challenges for operations in multipath-rich urban environment, in handling spoofing and interference, and in ensuring PNT integrity are addressed. A section on satellite navigation for engineering and scientific applications finishes off the volume.
Volume 2 of
consists of three parts and addresses PNT using alternative signals and sensors and integrated PNT technologies for consumer and commercial applications. It looks at PNT using various radio signals-of-opportunity, atomic clock, optical, laser, magnetic field, celestial, MEMS and inertial sensors, as well as the concept of navigation from Low-Earth Orbiting (LEO) satellites. GNSS-INS integration, neuroscience of navigation, and animal navigation are also covered. The volume finishes off with a collection of work on contemporary PNT applications such as survey and mobile mapping, precision agriculture, wearable systems, automated driving, train control, commercial unmanned aircraft systems, aviation, and navigation in the unique Arctic environment.
In addition, this text:
Serves as a complete reference and handbook for professionals and students interested in the broad range of PNT subjects Includes chapters that focus on the latest developments in GNSS and other navigation sensors, techniques, and applications Illustrates interconnecting relationships between various types of technologies in order to assure more protected, tough, and accurate PNT
will appeal to all industry professionals, researchers, and academics involved with the science, engineering, and applications of position, navigation, and timing technologies.pnt21book.com
Position, Navigation, and Timing Technologies in the 21st Century — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Position, Navigation, and Timing Technologies in the 21st Century», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Figure 40.15(a) shows the time‐frequency structure of an ATSC 3.0 frame, which lasts 50 ms (min) to 5 s (max) and occupies a bandwidth of 4.5 MHz to 6–8 MHz. It consists of three components: (i) a bootstrap located at the beginning of each frame as specified in [80], (ii) a preamble immediately following the bootstrap, containing L1 (the lowest layer of the ISO 7 layer model) control signaling applicable to the remainder of the frame, and (iii) one or more subframes as specified in [81]. A subframe contains an integer number of OFDM symbols (FFT size and GI duration) in the time dimension and spans the full range of configured carriers (scattered and/or continual pilot patterns and useful carriers) in the frequency dimension. Other attributes defining a subframe type include whether or not frequency interleaving is enabled and whether a subframe is single‐input single‐output (SISO) or MIMO. A frame may contain multiple subframes of different subframe types.
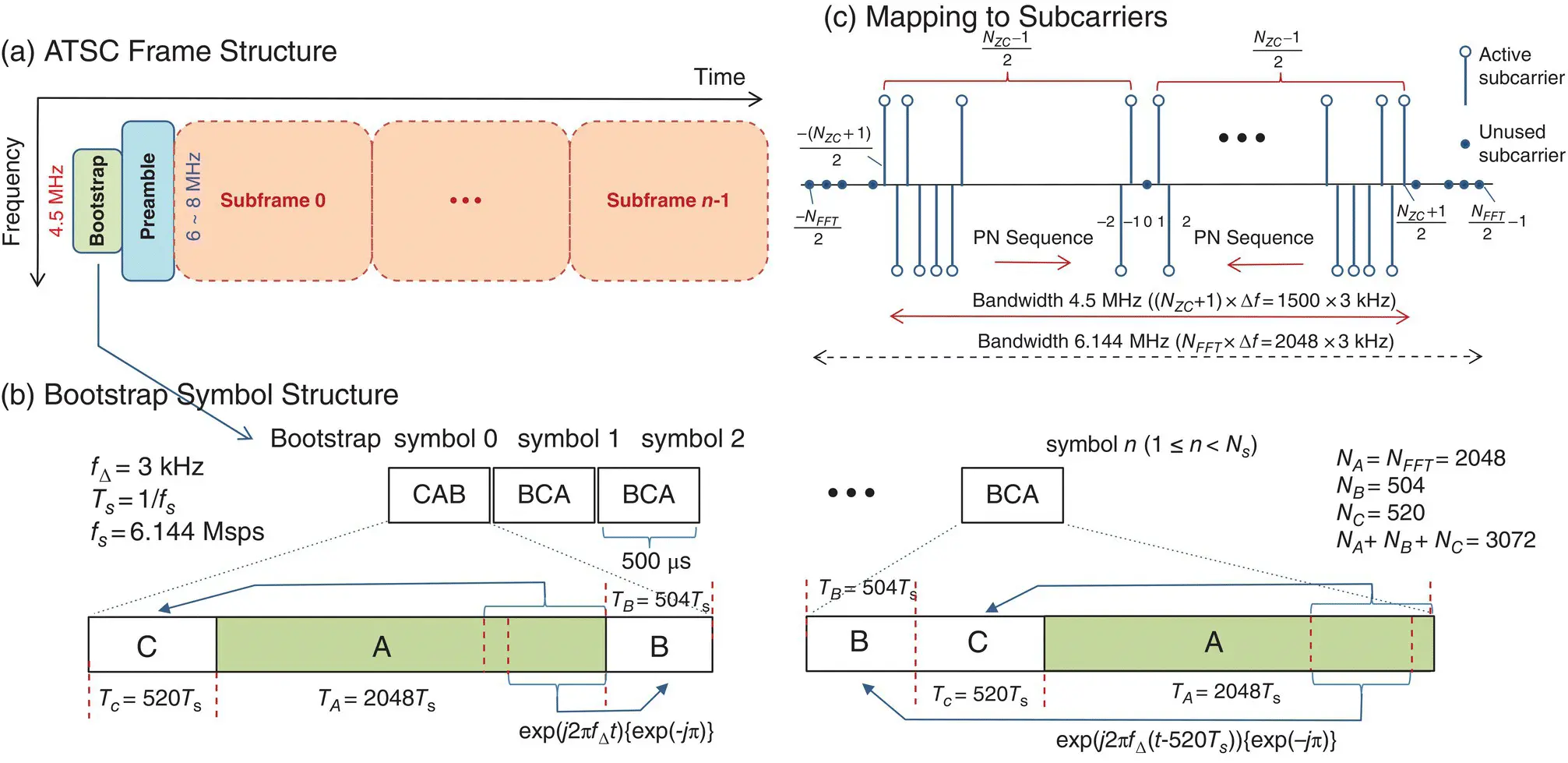
Figure 40.15 Bootstrap signaling within an ATSC 3.0 frame.
ATSC 3.0 introduces a new, unique feature called bootstrap. Providing a universal entry point into a digital transmission, the bootstrap is fixed in configuration (e.g. sampling rate, signal bandwidth, subcarrier spacing, and time‐domain structure) and is known to all receiving devices. The bootstrap signal has a fixed bandwidth of 4.5 MHz as compared to 6–8 MHz for the preamble and payload. As shown in Figure 40.15(b), the bootstrap consists of a number of symbols, beginning with a synchronization symbol positioned at the start of each frame period to enable signal discovery, coarse synchronization, frequency offset estimation, and initial channel estimation. The remainder of the bootstrap contains sufficient control signaling (information about the preamble, system bandwidth, sampling rate, and time to the next similar frame as well as services such as emergency alert) for reception and decoding of the rest of the frame. Each bootstrap symbol has three parts: A, B, and C, comprising complex‐valued time‐domain samples. Part A with N A= N FFT= 2048 is derived from the IFFT of the frequency‐domain structure with an appropriate cyclic shift. Part B with N B= 504 and Part C with N C= 520 are samples taken from Part A with a frequency shift ± f Δand a possible phase shift e −jπ. As shown in Figure 40.15(b), the initial symbol (bootstrap symbol 0) has the time‐domain structure CAB provided for synchronization, while the remaining bootstrap symbols use BCA up to and including the final one (bootstrap symbol N s), which indicates field termination with a phase inversion of subcarrier values (180°).
The values used for Part A of a bootstrap symbol originate from its frequency‐domain specification as a Zadoff–Chu (ZC) sequence modulated by a PN sequence, with the frequency‐domain structure shown in Figure 40.15(c). The ZC root and PN seed are used to signal the major and minor versions of the bootstrap, respectively. The length of the ZC sequence is N ZC= 1499, which is the largest prime that results in a channel bandwidth no greater than 4.5 MHz with a subcarrier spacing of Δ f = 3 kHz. The ZC sequence has a natural reflective symmetry about the DC subcarrier at which the mapped ZC sequence value is set to zero (the DC subcarrier is null). The ZC sequence remains the same for every symbol.
A length‐16 linear feedback shift register (LFSR) is used to generate the PN sequence of length 65,535. The sequence is initialized with the seed, representing the minor version, continues from one symbol to the next within a bootstrap (749 used per symbol), and is only re‐initialized with the seed for a new bootstrap. As shown in Figure 40.15(c), the PN sequence values assigned to the subcarriers below the DC subcarrier are mirror‐reflecting of those above the DC subcarrier to ensure a reflective symmetry such that the desirable constant amplitude zero autocorrelation (CAZAC) properties are retained for the product sequence. With bootstrap symbols, information is signaled through the use of cyclic shift in the time domain of the time‐domain sequence of symbols. Details about relative and absolute cyclic shifts using Gray code mapping as well as other information about preamble and subframes can be found in [80, 81].
Similar to other OFDM signals, pilot signals, whose location and amplitude are derived from a reference PN sequence, one for each transmitted carrier on any given symbol, can be used for synchronization, channel estimation, transmission mode identification, and phase noise estimation, among other uses. Pilots used in ATSC 3.0 include scattered, continual, edge, preamble, and subframe boundary pilots, which may be transmitted at a boosted power level and whose transmitted value is known to the receiver. ATSC 3.0 also specifies an optional technology of transmitter identification (TxID) that uniquely identifies each individual transmitter via an RF watermark, which enables system monitoring and measurements, interference source determination, geolocation, and other applications. For example, the TxID signal can be used to measure the CIR of each transmitter independently to support in‐service system adjustments, including the power levels and delay offsets of individual transmitters [80, 81]. Methods for timing and ranging using PN codes, cyclic prefix/suffix, pilot subcarriers, and watermarking signals described in previous sections for ATSC‐8VSB, DVB‐T, ISDB‐T, and DTMB signals are herein all applicable.
40.3 Pseudorange Measurements from Broadcasting Signals
As described in Section 40.2, TOA measurements from DTV signals (e.g. ATSC 8VSB, DVB‐T, and DTMB) are made relative to the receiver’s local timeline, which may differ from that of a transmitter by clock errors such as bias and drift. The TOA measurements can be taken at a fixed rate (periodic) or at a variable rate whenever a particular event such as the start of a field sync or an OFDM symbol occurs (aperiodic to the receiver). Besides TOA, TOT measurements are required to form pseudoranges from TOA measurements. Note that DTV transmitters can be synchronous as in a SFN or asynchronous, when each transmitter maintains its own clock loosely coupled to a common timeline like UTC.
To derive the pseudorange equations, we first establish the relationship between the timelines at the transmitter (labeled as TX time) and receiver (labeled as RX time) as shown in Figure 40.16. The event of interest for our ranging purpose is the leading edge of the ATSC 8VSB’s field sync segments (or of the useful part of OFDM symbols) represented by up‐pointing arrows in Figure 40.16.
The time at which this leading edge leaves the transmitter antenna is the TOT. The successive times of transmit are related by
(40.1) 
where n = 0, 1, 2, … is the number of fields, and T fieldis the nominal period of a field, which is about 24.2 ms (at a field rate of 41.32 Hz) for ATSC‐8VSB signals.
Assume that the receiver’s time ticks at a sampling rate of, say, 10 MHz. The TOA of the leading edge of the field sync segments is estimated by determining the location of the correlation peaks as detailed in Section 40.2.1. Referring to the RX time, we estimate the TOA by counting the samples between successive correlation peaks (denoted by P n) and the first peak relative to the first sample (denoted by P 0).
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Position, Navigation, and Timing Technologies in the 21st Century»
Представляем Вашему вниманию похожие книги на «Position, Navigation, and Timing Technologies in the 21st Century» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.











Обсуждение, отзывы о книге «Position, Navigation, and Timing Technologies in the 21st Century» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.