Position, Navigation, and Timing Technologies in the 21st Century
Здесь есть возможность читать онлайн «Position, Navigation, and Timing Technologies in the 21st Century» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: unrecognised, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Position, Navigation, and Timing Technologies in the 21st Century
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Position, Navigation, and Timing Technologies in the 21st Century: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Position, Navigation, and Timing Technologies in the 21st Century»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Volume 1 of
contains three parts and focuses on the satellite navigation systems, technologies, and engineering and scientific applications. It starts with a historical perspective of GPS development and other related PNT development. Current global and regional navigation satellite systems (GNSS and RNSS), their inter-operability, signal quality monitoring, satellite orbit and time synchronization, and ground- and satellite-based augmentation systems are examined. Recent progresses in satellite navigation receiver technologies and challenges for operations in multipath-rich urban environment, in handling spoofing and interference, and in ensuring PNT integrity are addressed. A section on satellite navigation for engineering and scientific applications finishes off the volume.
Volume 2 of
consists of three parts and addresses PNT using alternative signals and sensors and integrated PNT technologies for consumer and commercial applications. It looks at PNT using various radio signals-of-opportunity, atomic clock, optical, laser, magnetic field, celestial, MEMS and inertial sensors, as well as the concept of navigation from Low-Earth Orbiting (LEO) satellites. GNSS-INS integration, neuroscience of navigation, and animal navigation are also covered. The volume finishes off with a collection of work on contemporary PNT applications such as survey and mobile mapping, precision agriculture, wearable systems, automated driving, train control, commercial unmanned aircraft systems, aviation, and navigation in the unique Arctic environment.
In addition, this text:
Serves as a complete reference and handbook for professionals and students interested in the broad range of PNT subjects Includes chapters that focus on the latest developments in GNSS and other navigation sensors, techniques, and applications Illustrates interconnecting relationships between various types of technologies in order to assure more protected, tough, and accurate PNT
will appeal to all industry professionals, researchers, and academics involved with the science, engineering, and applications of position, navigation, and timing technologies.pnt21book.com
Position, Navigation, and Timing Technologies in the 21st Century — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Position, Navigation, and Timing Technologies in the 21st Century», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:

The normalized signal component of the discriminator function  is shown in Figure 38.18for t eml= {0.25, 0.5, 1, 1.5, 2}.
is shown in Figure 38.18for t eml= {0.25, 0.5, 1, 1.5, 2}.
It can be seen from Figure 38.18that for small values of  , the discriminator function can be approximated by a linear function given by
, the discriminator function can be approximated by a linear function given by
where α is the slope of the discriminator function at Δ t k= 0 [57], which is obtained by

Since R c( τ ) is symmetric,

and the linearized discriminator output becomes
(38.12) 
It is worth noting that R c( τ ) and R c′ ( τ ) are obtained by numerically computing the autocorrelation function of the pulse‐shaped short code. Since the FIR of the pulse shaping filter h [ k ] is defined over only 48 values of k , the autocorrelation function R c( τ ) will be defined over 95 values of τ . However, interpolation may be used to evaluate R c( τ ) and R c′ ( τ ) at any τ . The mean and variance of D kcan be obtained from Eq. (38.12), and are given by
(38.13) 


(38.14) 
Now that the discriminator statistics are known, the closed‐loop pseudorange error is characterized next.
38.5.3.2 Closed‐Loop Analysis
In order to achieve the desired loop noise‐equivalent bandwidth, K in Eq. (38.11)must be normalized according to
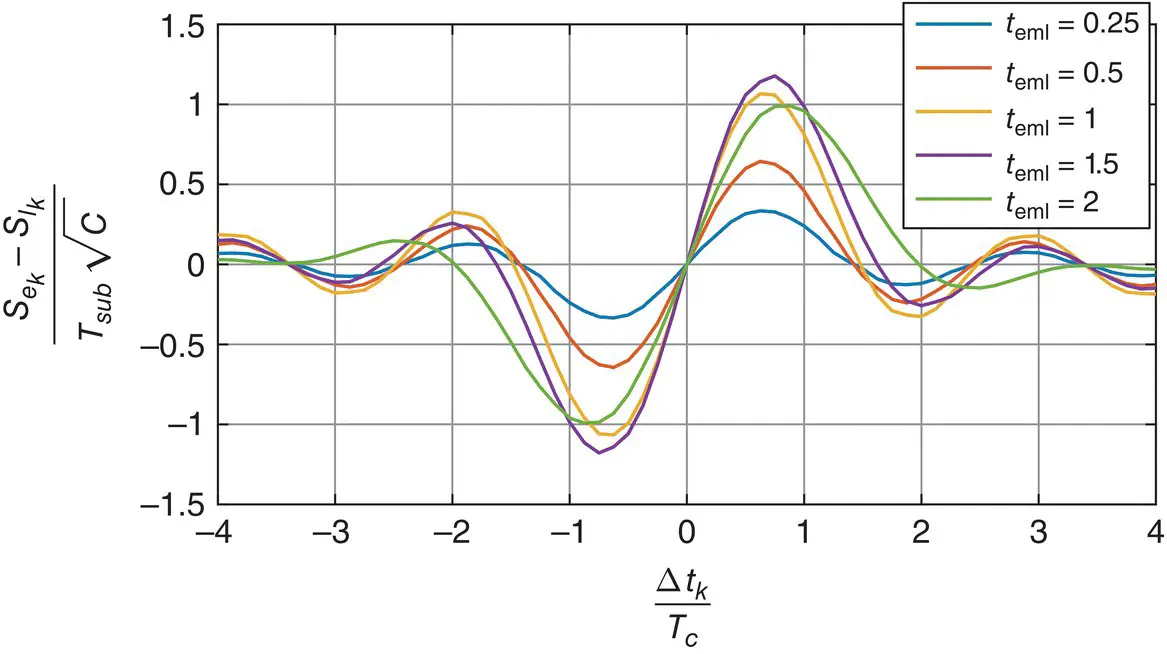
Figure 38.18 Output of the coherent baseband discriminator function for the CDMA short code with different correlator spacings (Khalife et al. [12]).
Source: Reproduced with permission of IEEE.
(38.15) 
In cellular CDMA systems, for a t emlof 1.2, the loop filter gain becomes K ≈ 4 B n, DLL; hence, the choice of K in Section 38.5.2.3. Assuming a zero‐mean tracking error, that is,  , the variance of the code start time error is given by
, the variance of the code start time error is given by

At steady state, var{Δ t k + 1} becomes
(38.16) 
where Δ t is the steady‐state code start time error. Combining Eqs. (38.15)– (38.16)yields
(38.17) 
The pseudorange can hence be expressed as

where v ( k ) is a zero‐mean random variable with variance σ 2= c 2· var {Δ t }. Figure 38.19shows a plot of the standard deviation of Δ t , denoted by σ , as a function of the carrier‐to‐noise ratio C / N 0for t eml= 1.25 chips.
38.5.4 Cellular CDMA Navigation Experimental Results
This section presents experimental results for navigation with cellular CDMA signals. These results did not suffer from the BTS sector clock discrepancy issue (discussed in Section 38.7), since signals from only one sector antenna in each BTS cell were used. Experimental results exhibiting the BTS sector clock discrepancy issue and mitigation approaches are studied in [23, 25]. Section 38.5.4.1analyzes the pseudorange obtained by the receiver discussed in Section 38.5.2. Sections 38.5.4.2and 38.5.4.3present navigation results with aerial and ground vehicles, respectively.
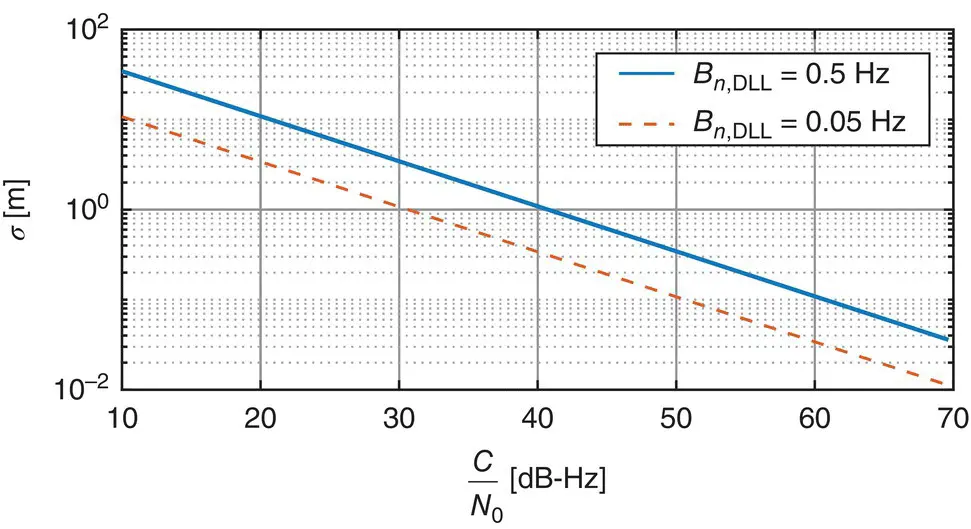
Figure 38.19 Plot of σ , the standard deviation of Δ t , as a function of the carrier‐to‐noise ratio  for t eml= 1.25 chips and B n,DLL= {0.5 Hz, 0.05 Hz} (Khalife et al. [12]).
for t eml= 1.25 chips and B n,DLL= {0.5 Hz, 0.05 Hz} (Khalife et al. [12]).
Source: Reproduced with permission of IEEE.
38.5.4.1 Pseudorange Analysis
The variation in the pseudorange obtained by the receiver discussed in Section 38.5.2is compared to the variation in the true range between a mobile receiver and cellular CDMA BTSs. For this purpose, the receiver was mounted on two platforms: (i) an unmanned aerial vehicle (UAV) and (ii) a ground vehicle [12, 18, 25].
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Position, Navigation, and Timing Technologies in the 21st Century»
Представляем Вашему вниманию похожие книги на «Position, Navigation, and Timing Technologies in the 21st Century» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.











Обсуждение, отзывы о книге «Position, Navigation, and Timing Technologies in the 21st Century» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.