Savo G. Glisic - Artificial Intelligence and Quantum Computing for Advanced Wireless Networks
Здесь есть возможность читать онлайн «Savo G. Glisic - Artificial Intelligence and Quantum Computing for Advanced Wireless Networks» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: unrecognised, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Artificial Intelligence and Quantum Computing for Advanced Wireless Networks
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:3 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Artificial Intelligence and Quantum Computing for Advanced Wireless Networks: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Artificial Intelligence and Quantum Computing for Advanced Wireless Networks»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
A practical overview of the implementation of artificial intelligence and quantum computing technology in large-scale communication networks Artificial Intelligence and Quantum Computing for Advanced Wireless Networks
Artificial Intelligence and Quantum Computing for Advanced Wireless Networks
Artificial Intelligence and Quantum Computing for Advanced Wireless Networks — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Artificial Intelligence and Quantum Computing for Advanced Wireless Networks», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
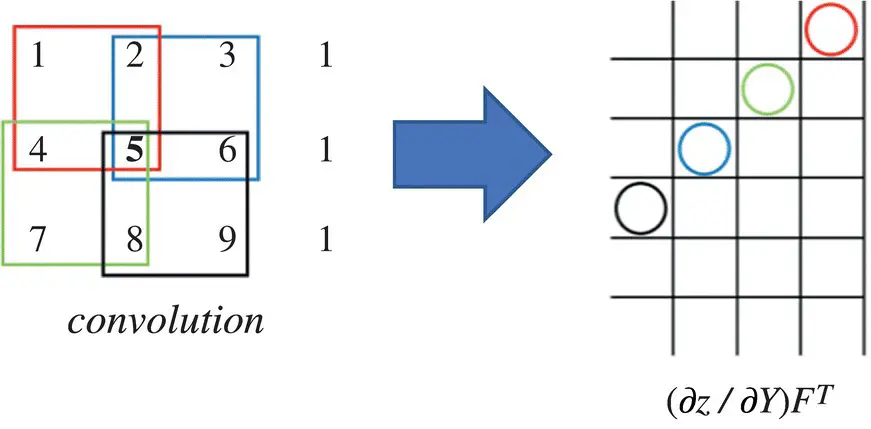
Figure 3.25 Computing ∂z / ∂X . (for more details see the color figure in the bins).
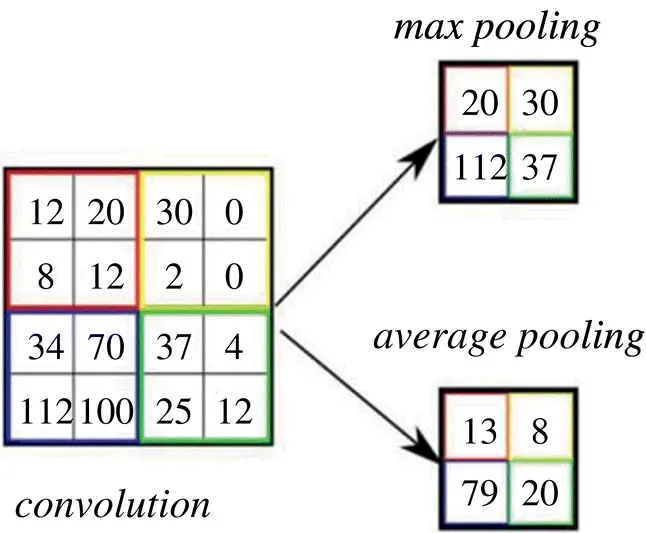
Figure 3.26 Illustration of pooling layer operation. (for more details see the color figure in the bins).
Formally this can be represented as
(3.103) 
where 0 ≤ i l + 1< H l + 1, 0 ≤ j l + 1< W l + 1, and 0 ≤ d < D l + 1= D l.
Pooling is a local operator, and its forward computation is straightforward. When focusing on the backpropagation, only max pooling will be discussed and we can resort to the indicator matrix again. All we need to encode in this indicator matrix is: for every element in y , where does it come from in x l?
We need a triplet ( i l, j l, d l) to locate one element in the input x l, and another triplet ( i l + 1, j l + 1, d l + 1) to locate one element in y . The pooling output  comes from
comes from  , if and only if the following conditions are met: (i) they are in the same channel; (ii) the ( i l, j l)‐th spatial entry belongs to the ( i l + 1, j l + 1)‐th subregion; and (iii) the ( i l, j l)‐th spatial entry is the largest one in that subregion. This can be represented as
, if and only if the following conditions are met: (i) they are in the same channel; (ii) the ( i l, j l)‐th spatial entry belongs to the ( i l + 1, j l + 1)‐th subregion; and (iii) the ( i l, j l)‐th spatial entry is the largest one in that subregion. This can be represented as

where ⌊·⌋ is the floor function. If the stride is not H ( W ) in the vertical (horizontal) direction, the equation must be changed accordingly. Given a ( i l + 1, j l + 1, d l + 1) triplet, there is only one ( i l, j l, d l) triplet that satisfies all these conditions. So, we define an indicator matrix  .
.
One triplet of indexes ( i l + 1, j l + 1, d l + 1) specifies a row in S , while ( i l, j l, d l) specifies a column. These two triplets together pinpoint one element in ( x l). We set that element to 1 if d l + 1= d land  , are simultaneously satisfied, and 0 otherwise. One row of S ( x l) corresponds to one element in y , and one column corresponds to one element in x l. By using this indicator matrix, we have vec( y ) = S ( x l) vec ( x l) and
, are simultaneously satisfied, and 0 otherwise. One row of S ( x l) corresponds to one element in y , and one column corresponds to one element in x l. By using this indicator matrix, we have vec( y ) = S ( x l) vec ( x l) and

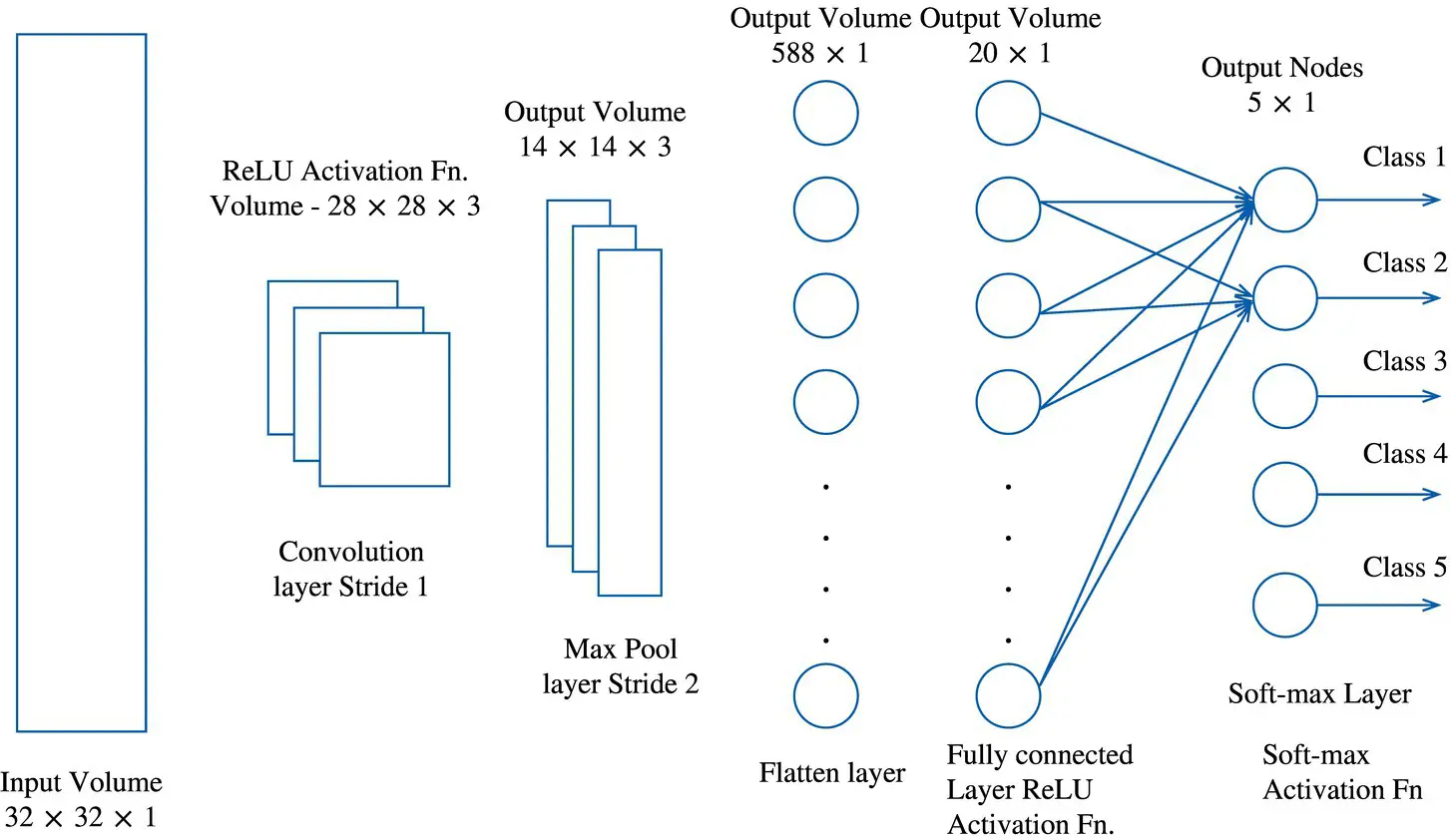
Figure 3.27 Illustration of preprocessing in a cooperative neural network (CoNN)‐based image classifier.
resulting in
(3.104) 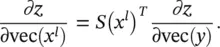
S ( x l) is very sparse since it has only one nonzero entry in every row. Thus, we do not need to use the entire matrix in the computation. Instead, we just need to record the locations of those nonzero entries – there are only H l + 1 W l + 1 D l + 1such entries in S ( x l). Figure 3.27illustrates preprocessing in a CoNN‐based image classifier.
For further readings on CoNNs, the reader is referred to [30].
References
1 1 CS231n Convolutional Neural Networks for Visual Recognition. Stanford University. https://cs231n.github.io/neural‐networks‐1
2 2 Haykin, S. (1996). Adaptive Filter Theory, 3e. Upper Saddle River, NJ: Prentice‐Hall.
3 3 Haykin, S. (1996). Neural networks expand SP's horizons. IEEE Signal Process. Mag. 13 (2): 24–49.
4 4 Haykin, S. (1999). Neural Networks: A Comprehensive Foundation, 2e. Upper Saddle River, NJ: Prentice‐Hall.
5 5 Wan, E.A. (1993). Finite impulse response neural networks with applications in time series prediction, Ph.D. dissertation. Department of Electrical Engineering, Stanford University, Stanford, CA.
6 6 Box, G. and Jenkins, G.M. (1976). Time Series Analysis: Forecasting and Control. San Francisco, CA: Holden‐Day.
7 7 Weigend, A.S. and Gershenfeld, N.A. (1994). Time Series Prediction: Fore‐ Casting the Future and Understanding the Past. Reading, MA: Addison‐Wesley.
8 8 Hochreiter, S. and Schmidhuber, J. (1997). Long short‐term memory. Neural Comput. 9 (8): 1735–1780.
9 9 Schuster, M. and Paliwal, K.K. (1997). Bidirectional recurrent neural networks. IEEE Trans. Signal Process. 45 (11): 2673–2681.
10 10 Graves, A. and Schmidhuber, J. (2005). Framewise phoneme classification with bidirectional LSTM and other neural network architectures. Neural Netw. 18 (5): 602–610.
11 11 Graves, A., Liwicki, M., Fernandez, S. et al. (2009). A novel connectionist system for unconstrained handwriting recognition. IEEE Trans. Pattern Anal. Mach. Intell. 31 (5): 855–868.
12 12 Graves, A., Wayne, G., and Danihelka, I. (2014). Neural Turing machines. arXiv preprint arXiv:1410.5401.
13 13 Baddeley, A., Sala, S.D., and Robbins, T.W. (1996). Working memory and executive control [and discussion]. Philos. Trans. R. Soc. B: Biol. Sci. 351 (1346): 1397–1404.
14 14 Chua, L.O. and Roska, T. (2002). Cellular Neural Networks and Visual Computing: Foundations and Applications. New York, NY: Cambridge University Press.
15 15 Chua, L.O. and Yang, L. (1988). Cellular neural network: theory. IEEE Trans. Circuits Syst. 35: 1257–1272.
16 16 Molinar‐Solis, J.E., Gomez‐Castaneda, F., Moreno, J. et al. (2007). Programmable CMOS CNN cell based on floating‐gate inverter unit. J. VLSI Signal Process. Syst. Signal, Image, Video Technol. 49: 207–216.
17 17 Pan, C. and Naeemi, A. (2016). A proposal for energy‐efficient cellular neural network based on spintronic devices. IEEE Trans. Nanotechnol. 15 (5): 820–827.
18 18 Wang, L. et al. (1998). Time multiplexed color image processing based on a CNN with cell‐state outputs. IEEE Trans. VLSI Syst. 6 (2): 314–322.
19 19 Roska, T. and Chua, L.O. (1993). The CNN universal machine: an analogic array computer. IEEE Trans. Circuits Systems II: Analog Digital Signal Process. 40 (3): 163–173.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Artificial Intelligence and Quantum Computing for Advanced Wireless Networks»
Представляем Вашему вниманию похожие книги на «Artificial Intelligence and Quantum Computing for Advanced Wireless Networks» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.












Обсуждение, отзывы о книге «Artificial Intelligence and Quantum Computing for Advanced Wireless Networks» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.