Джон Ловин - Создаем робота-андроида своими руками
Здесь есть возможность читать онлайн «Джон Ловин - Создаем робота-андроида своими руками» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Москва, Год выпуска: 2007, ISBN: 2007, Издательство: Array Литагент «ДМК», Жанр: Технические науки, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Создаем робота-андроида своими руками
- Автор:
- Издательство:Array Литагент «ДМК»
- Жанр:
- Год:2007
- Город:Москва
- ISBN:5-9706-0032-6
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Создаем робота-андроида своими руками: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Создаем робота-андроида своими руками»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Издание окажется крайне полезным для всех любителей электроники и телемеханики как классическое руководство по функционально-блочному построению робототехнических устройств.
Создаем робота-андроида своими руками — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Создаем робота-андроида своими руками», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Для управления одним воздушным клапаном достаточно задействовать один вывод на разъеме параллельного порта (порт принтера) и вывод земли (см. рис. 16.16). Вывод подключается через логический элемент – неинвертированную буферную схему на ИС 4050HCT. Выход буфера управляет транзисторным ключом на транзисторе TIP 120 NPN Darlington. Транзистор управляет током, протекающим через воздушный клапан.
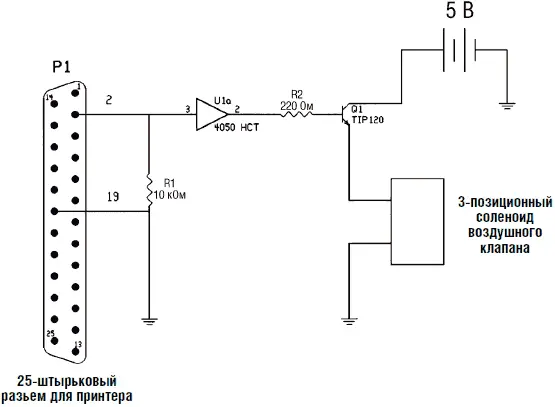
Рис. 16.16. Принципиальная схема контроллера воздушного клапана
Программа на BASIC
Программа на BASIC очень проста. После нахождения адреса порта прин тера, программа управляет работой воздушного клапана через вывод 2.
5 REM Контроллер соленоида воздушного клапана
10 REM Джон Иовин
15 REM Найти адрес порта принтера
20 DEF SEG = 0
25 a = (PEEK(1032) + 256 * PEEK(1033))
30 REM Следующая строка включает воздушную мышцу
35OUT a ,1
40 REM Следующая строка выключает воздушную мышцу
45 OUT a , 0
При высоком уровне сигнала на выводе 2 DB 25 воздушный клапан открывается и подается воздух в воздушную мышцу. При низком уровне сигнала на выводе 2 нагнетание воздуха в воздушную мышцу прекращается, и клапан выпускает воздух из мышцы.
Другие источники воздуха
I В воздушной мышце, которую мы описывали, в качестве источника сжа
того воздуха использовался ножной насос и пластиковая бутылка в качестве воздушного резервуара. Понятно, что можно использовать сжатый воздух из любого доступного источника. Например, вы можете приобрести небольшие баллончики со сжатым воздухом, используемые в краскораспылителях. Небольшие трубки и фитинги, имеющиеся в комплектах таких распылителей, помогут вам в ваших экспериментах.
На рынке имеются несколько моделей небольших электрических воздушных компрессоров. Более дорогие модели, используемые в краскораспылителях, имеют металлические резервуары для хранения воздуха и регуляторы давления. На другом конце ценовой шкалы находятся дешевые портативные воздушные компрессоры, работающие от 12 В постоянного тока и используемые для накачки шин. В таких компрессорах, как правило, нет воздушного резервуара и регулятора давления. Подобные компрессоры можно приобрести для того, чтобы создать недорогую пневматическую систему.
Для систем автоматических воздушных компрессоров никогда не используйте пластиковые бутылки. Такие бутылки можно использовать для хранения воздуха исключительно в системах ручных (или ножных) компрессоров (насосов). В автоматических системах сжатия воздуха используйте только специальные емкости, предназначенные для хранения сжатого воздуха. Небольшие емкости стоят достаточно недорого.
Безопасность прежде всего
Пневматические системы используются в быту относительно редко, поэтому лишь немногие умеют правильно обращаться с подобными устройствами. По этой причине при работе с пневматическими системами необходимо придерживаться некоторых правил техники безопасности.
При испытании нового устройства всегда носите защитные очки.
Не присоединяйте пластиковую бутылку к автоматическому компрессору.
Ни в коем случае не используйте для хранения воздуха стеклянные бутылки.
Не используйте в качестве резервуаров бутылки объемом более 1 литра.
Не отворачивайте крышку бутылки, не вынимайте клапан и не снимайте трубки с патрубков, когда система находится под давлением. Перед выполнением этих операций обязательно спустите давление в системе.
Кисть руки андроида
Конструирование механизма захвата, напоминающего кисть руки человека, начинается с визита в магазин игрушек. Нам потребуется игрушка под названием Awesome Arm, выпускаемая китайской компанией Zima (см. рис. 16.17). Для того чтобы вам хватило «пальцев», необходимо купить две такие игрушки. Большой палец игрушки имеет фиксированное положение, и его нельзя использовать.
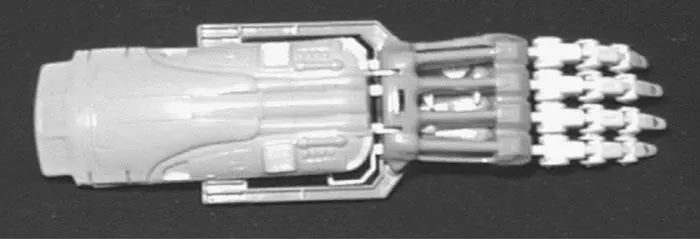
Рис. 16.17. Механическая рука Awesome компании Zima
Игрушка работает следующим образом: «пальцы» игрушки приводятся в действие пальцами оператора, т. е. игрушка представляет собой род дистанционного манипулятора. Чтобы сделать андроидную кисть руки, нам придется разобрать игрушки и удалить из них большинство деталей.
Когда вы перевернете руку, то вы увидите пять небольших винтов, которые скрепляют конструкцию. Отверните эти винты, и конструкция распадется на части (см. рис. 16.18). Вытащите «пальцевую» часть игрушки (см. рис. 16.19). Остальные части игрушки нам не потребуются. На конце стерженьков, которые управляют «пальцами», находятся «колечки», куда оператор вставляет пальцы при управлении игрушкой. Нам эти колечки не понадобятся, поэтому необходимо удалить их с помощью кусачек, оставив длинный пластиковый стержень.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Создаем робота-андроида своими руками»
Представляем Вашему вниманию похожие книги на «Создаем робота-андроида своими руками» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.





Обсуждение, отзывы о книге «Создаем робота-андроида своими руками» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.