Джон Ловин - Создаем робота-андроида своими руками
Здесь есть возможность читать онлайн «Джон Ловин - Создаем робота-андроида своими руками» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Москва, Год выпуска: 2007, ISBN: 2007, Издательство: Array Литагент «ДМК», Жанр: Технические науки, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Создаем робота-андроида своими руками
- Автор:
- Издательство:Array Литагент «ДМК»
- Жанр:
- Год:2007
- Город:Москва
- ISBN:5-9706-0032-6
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Создаем робота-андроида своими руками: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Создаем робота-андроида своими руками»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Издание окажется крайне полезным для всех любителей электроники и телемеханики как классическое руководство по функционально-блочному построению робототехнических устройств.
Создаем робота-андроида своими руками — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Создаем робота-андроида своими руками», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Перед установкой головку верхнего винта необходимо продеть в отверстие верхней петли воздушной мышцы. В отверстие нижней петли воздушной мышцы продевается отрезок резиновой ленты, который затем закрепляется на нижнем винте. В свободном состоянии мышцы резиновая лента должна ее растягивать.
Произведите необходимые соединения деталей, как это показано на рис. 16.4. В некоторых случаях у меня возникали трудности при надевании трубки диаметром 4 мм на патрубки. Здесь существует несколько хитростей. Во-первых, если трубка не хочет надеваться на переходник, то можно поместить ее под струю горячей воды из водопроводного крана. Это размягчит пластик и позволит выполнить операцию. Можно также воспользоваться отрезком прозрачной пластиковой медицинской трубки. Пластиковая трубка достаточно плотно надевается на патрубки переходников (см. рис. 16.11). С другой стороны, она является достаточно растяжимой, чтобы в нее можно было вставить трубку диаметром 4 мм (см. рис. 16.12). Отрезок мягкой трубки выполняет роль переходника и легко может быть расцеплен при смене устройств, использующих воздушные мышцы.

Рис. 16.11. Использование прозрачной медицинской трубки со стандартными переходниками
Рис. 16.12. Соединение прозрачной трубки и трубки 4 мм
Чтобы устройство заработало, сперва создайте избыточное давление с помощью ножного насоса. Чтобы поднять давление до 3,5 кгс, достаточно четырех нажатий. Время работы с насосом зависит от емкости используемой полиэтиленовой бутылки.
Откройте трехпозиционный клапан для заполнения мышцы воздухом. Мышца немедленно сократится. Вы можете определить отношение сокращения мышцы в зависимости от величины подаваемого избыточного давления. Вы сможете совершить четыре или пять полных циклов сокращения – расслабления мышцы, прежде чем вам снова потребуется наполнить бутылку воздухом. Действительно, мышца при работе потребляет очень небольшое количество воздуха.
Обратите внимание, что воздушная мышца остается в сокращенном состоянии до тех пор, пока кран воздушного клапана не повернут для выпуска воздуха. Для поддержания мышцы в сокращенном состоянии не требуется энергия. В противоположность этому для обеспечения втягивания или вытягивания соленоида и позиционирования сервомотора они должны постоянно снабжаться электрической энергией.
Если мышца не сокращается, то она, возможно, не была достаточно растянута в исходном состоянии. Помните, что нормальная работа воздушной мышцы обеспечивается только при ее предварительном растяжении.
Изготовление второго демонстрационного устройства
Вторая модель представляет собой рычаг (см. рис. 16.13 и 16.14). Я изготовил модель рычага из дерева и пластика. Воздушная мышца и резиновая лента прикреплены к рычагу с помощью винтов. В точке опоры рычаг закреплен на деревянном штифте. На втором деревянном штифте крепятся воздушная мышца и резиновая лента. Устройство работает при помощи трехпозиционного клапана, о чем я уже рассказывал выше. При подаче воздуха рычаг поднимается вверх.
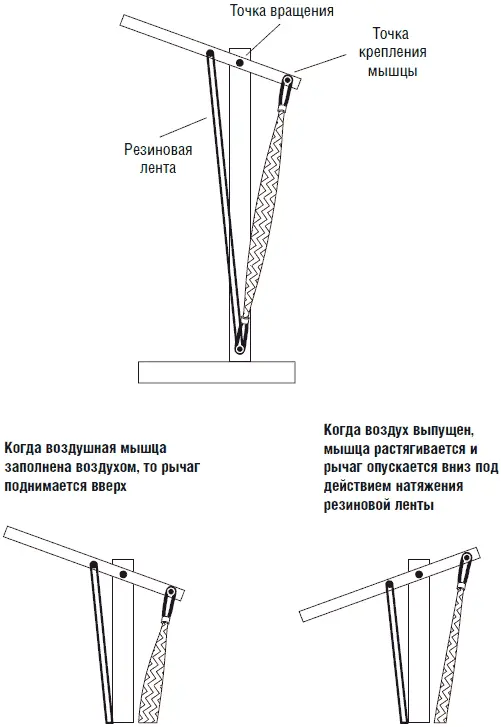
Рис. 16.13. Вторая демонстрационная модель «рычаг»

Рис. 16.14. Вторая демонстрационная модель «рычаг»
IBM интерфейс
Управление с помощью компьютера очень просто. Компьютер управляет электрическим трехпозиционным клапаном. Недорогие трехпозиционные, управляемые с помощью электрического соленоида воздушные клапаны имеются в продаже (см. рис. 16.15). Воздушный клапан управляется постоянным напряжением 5 В и рассчитан на давление до 6,3 кгс. Воздушный клапан имеет легко присоединяемые и разъединяемые воздушные «разъемы». Трубка диаметром 4 мм легко входит в отверстие клапана и там надежно фиксируется. Для отсоединения трубки необходимо нажать пальцами на кольцо вокруг отверстия клапана, а затем вынуть трубку диаметром 4 мм.
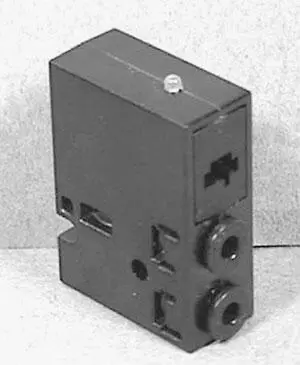
Рис. 16.15. Электрический трехпозиционный воздушный клапан
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Создаем робота-андроида своими руками»
Представляем Вашему вниманию похожие книги на «Создаем робота-андроида своими руками» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.





Обсуждение, отзывы о книге «Создаем робота-андроида своими руками» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.