Джон Ловин - Создаем робота-андроида своими руками
Здесь есть возможность читать онлайн «Джон Ловин - Создаем робота-андроида своими руками» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Москва, Год выпуска: 2007, ISBN: 2007, Издательство: Array Литагент «ДМК», Жанр: Технические науки, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Создаем робота-андроида своими руками
- Автор:
- Издательство:Array Литагент «ДМК»
- Жанр:
- Год:2007
- Город:Москва
- ISBN:5-9706-0032-6
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Создаем робота-андроида своими руками: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Создаем робота-андроида своими руками»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Издание окажется крайне полезным для всех любителей электроники и телемеханики как классическое руководство по функционально-блочному построению робототехнических устройств.
Создаем робота-андроида своими руками — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Создаем робота-андроида своими руками», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
В некоторых последовательностях знание только исходного положения оказывается недостаточным, например при поднятии яйца без риска раздавить его скорлупу. В подобных случаях необходима более сложная и точная система позиционной обратной связи. Сигналы с датчиков могут быть обработаны с помощью АЦП. Полученные сигналы могут быть использованы для определения значений таких параметров, как положение, давление, скорость и вращающий момент. В качестве иллюстрации можно привести следующий простой пример. Представьте, что вы прикрепили небольшой линейный переменный резистор к узлу захвата. Переменный резистор установлен таким образом, что перемещение его движка вперед и назад связано с открытием и закрытием захвата. Таким образом, в зависимости от степени открывания захвата меняется сопротивление переменного резистора. После проведения калибровки, с помощью измерения текущего сопротивления переменного резистора можно точно установить угол раскрытия зажимов захвата.
Создание подобной системы обратной связи вводит еще один уровень сложности в устройство и, соответственно, приводит к его удорожанию. Поэтому более простым вариантом является введение системы ручного управления для корректировки положения и движений руки-манипулятора в процессе выполнения script-программы.
Система ручного управления интерфейсом
После того как вы убедитесь, что интерфейс работает правильным образом, вы можете с помощью 8-контактного плоского разъема подключить к нему блок ручного управления. Проверьте положение подключения 8-контактного разъема Molex к головке разъема на плате интерфейса, как показано на рис. 15.10. Аккуратно вставьте разъем до его надежного соединения. После этого рукой-манипулятором можно управлять с ручного пульта в любой момент времени. Не имеет значения, соединен ли интерфейс с компьютером или нет.

Рис. 15.10. Подключение ручного управления
Программа DOS управления с клавиатуры
Имеется DOS программа, позволяющая управлять работой руки-манипулятора с клавиатуры компьютера в интерактивном режиме. Список клавиш, соответствующих выполнению той или иной функции, приведен в таблице.

Голосовое управление рукой-манипулятором
B голосовом управлении рукой-манипулятором используется набор распознавания речи (УРР), который был описан в гл. 7. В этой главе мы изготовим интерфейс, связывающий УРР с рукой-манипулятором. Этот интерфейс также предлагается в виде набора компанией Images SI, Inc.
Схема интерфейса для УРР показана на рис. 15.11. В интерфейсе использован микроконтроллер 16F84. Программа для микроконтроллера выглядит следующим образом:
‘Программа интерфейса УРР
Symbol PortA = 5
Symbol TRISA = 133
Symbol PortB = 6
Symbol TRISB = 134
Poke TRISA, 255
Poke TRISB, 240
Start:
Peek PortB, B0
If bit4 = 0 then trigger ‘Если запись в триггер разрешена, читать схе
му УРР
Goto start ‘Повторение
trigger:
pause 500 ‘Ожидание 0,5 с
Peek PortB, B0 ‘Чтение кода BCD
If bit5 = 1 then send ‘Выходной код
goto start ‘Повторение
send:
peek PortA, b0 ‘Чтение порта А
if bit4 = 1 then eleven ‘Число есть 11?
poke PortB, b0 ‘Выходной код
goto start ‘Повторение
eleven:
if bit0 = 0 then ten
poke portb, 11
goto start ‘Повторение
ten:
poke portb,10
goto start ‘Повторение
end
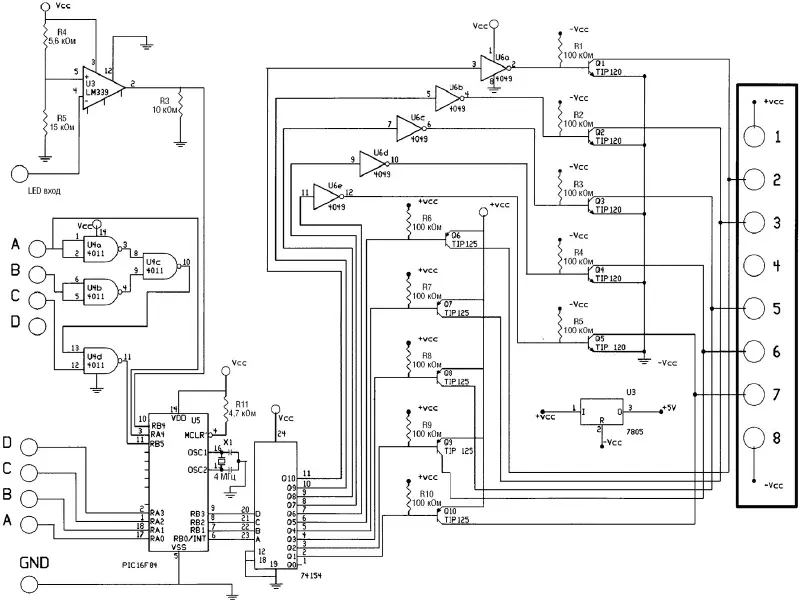
Рис. 15.11. Схема контроллера УРР для руки-робота
Обновление программы под 16F84 можно бесплатно загрузить из http://www.imagesco.com
Программирование интерфейса УРР
Программирование интерфейса УРР аналогично процедуре программирования УРР из набора, описанного в гл. 7. Для правильной работы руки-манипулятора вы должны запрограммировать командные слова соответственно номерам, соответствующим определенному движению манипулятора. В табл. 15.1 приведены примеры командных слов, управляющих работой руки-манипулятора. Вы можете выбрать командные слова по вашему вкусу.

Список деталей для интерфейса PC
• (5) Транзистор NPN TIP120
• (5) Транзистор PNP TIP 125
• (1) ИС 74164 преобразователь кода
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Создаем робота-андроида своими руками»
Представляем Вашему вниманию похожие книги на «Создаем робота-андроида своими руками» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.





Обсуждение, отзывы о книге «Создаем робота-андроида своими руками» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.