Джон Ловин - Создаем робота-андроида своими руками
Здесь есть возможность читать онлайн «Джон Ловин - Создаем робота-андроида своими руками» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Москва, Год выпуска: 2007, ISBN: 2007, Издательство: Array Литагент «ДМК», Жанр: Технические науки, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Создаем робота-андроида своими руками
- Автор:
- Издательство:Array Литагент «ДМК»
- Жанр:
- Год:2007
- Город:Москва
- ISBN:5-9706-0032-6
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Создаем робота-андроида своими руками: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Создаем робота-андроида своими руками»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Издание окажется крайне полезным для всех любителей электроники и телемеханики как классическое руководство по функционально-блочному построению робототехнических устройств.
Создаем робота-андроида своими руками — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Создаем робота-андроида своими руками», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
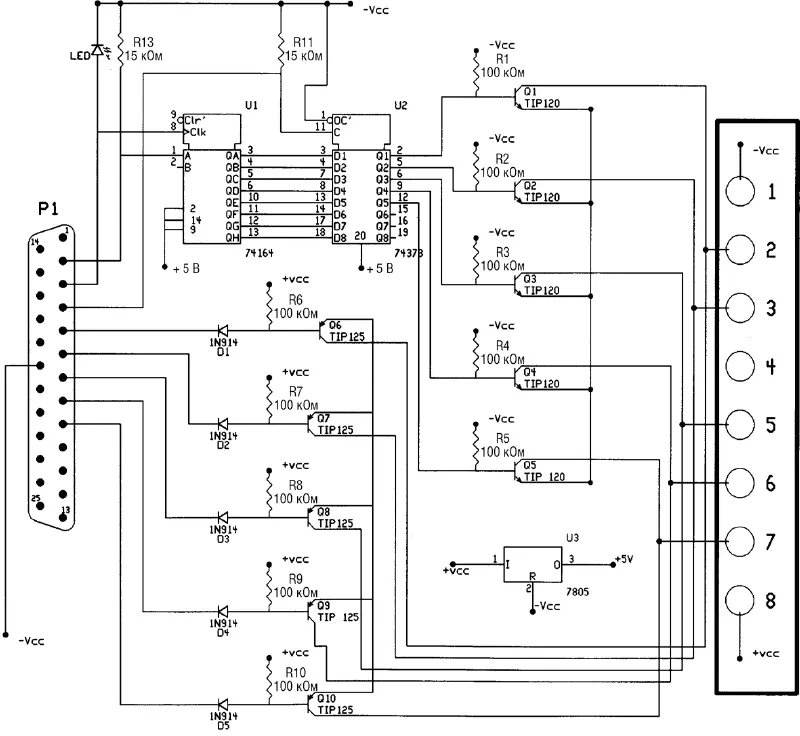
Рис. 15.5. Принципиальная схема интерфейса РС
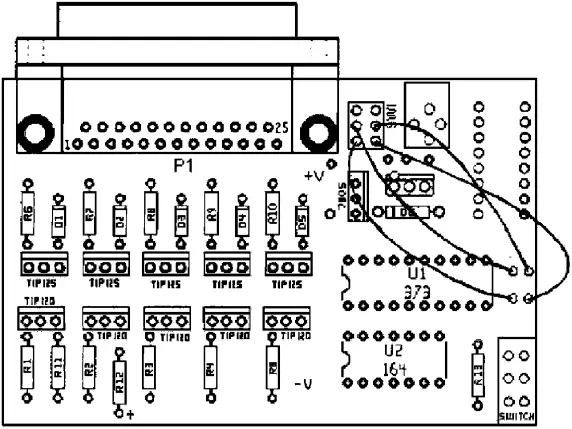
Рис. 15.6. Схема расположения деталей РС интерфейса
Прежде всего нужно определить сторону монтажа печатной платы. На стороне монтажа прочерчены белые линии, обозначающие резисторы, транзисторы, диоды, ИС и разъем DB25. Все детали вставляются в плату с монтажной стороны.
Общее указание: после пайки детали к проводникам печатной платы необходимо удалить излишне длинные выводы со стороны печати. Очень удобно следовать определенной последовательности при монтаже деталей. Сперва смонтируйте резисторы 100 кОм (цветная маркировка колец: коричневое, черное, желтое, золотое или серебряное), которые обозначены R1-R10. Затем смонтируйте 5 диодов D1-D5, убедившись, что черная полоска на диодах находится напротив разъема DB25, как это показано белыми линиями, нанесенными на монтажную сторону печатной платы. Затем смонтируйте резисторы 15 кОм (цветная маркировка, коричневый, зеленый, оранжевый, золотой или серебряный), обозначенные R11 и R13. В позиции R12 припаяйте к плате красный светодиод. Анод светодиода соответствует отверстию под R12, обозначенному знаком +. Затем смонтируйте 14– и 20-контактные панельки под ИС U1 и U2. Смонтируйте и впаяйте разъем DB25 уголкового типа. Не пытайтесь вставлять ножки разъема в плату с излишним усилием, здесь требуется исключительно точность. При необходимости осторожно покачайте разъем, стараясь не погнуть ножки выводов. Закрепите движковый переключатель и регулятор напряжения типа 7805. Отрежьте четыре куска провода необходимой длины и припаяйте к верхней части переключателя. Придерживайтесь расположения проводов, как показано на рисунке. Вставьте и впаяйте транзисторы TIP 120 и TIP 125. Наконец, впаяйте восьмиконтактный цокольный разъем и соединительный 75 миллиметровый кабель. Цоколь монтируется так, что наиболее длинные выводы смотрят вверх. Вставьте две ИС – 74LS373 и 74LS164 – в соответствующие панельки. Убедитесь, что положение ключа ИС на ее крышке совпадает с ключом, помеченным белыми линиями на печатной плате. Вы могли заметить, что на плате остались места под дополнительные детали. Это место предназначено для сетевого адаптера. На рис. 15.7 показана фотография готового интерфейса со стороны монтажа.
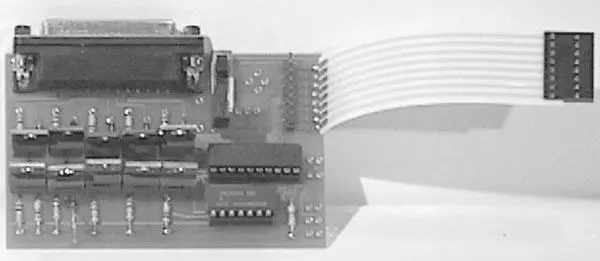
Рис. 15.7. РС интерфейс в сборе. Вид сверху
Принцип работы интерфейса
Рука-манипулятор имеет пять двигателей постоянного тока. Соответственно нам потребуются 10 шин входа/выхода для управления каждым двигателем, включая направление вращения. Параллельный (принтерный) порт IBM PC и совместимых машин содержит только восемь шин ввода/вывода. Для увеличения числа шин управления в интерфейсе руки робота используется ИС 74LS164, которая является преобразователем последовательного кода в параллельный (SIPO). При использовании всего двух шин параллельного порта D0 и D1, по которым посылается последовательный код в ИС, мы можем получить восемь дополнительных шин ввода/вывода. Как уже говорилось, можно создать восемь шин ввода/вывода, но в данном интерфейсе используются пять из них.
Когда последовательный код поступает на вход ИС 74LS164, на выходе ИС появляется соответствующий параллельный код. Если бы выходы ИС 74LS164 были непосредственно подключены к входам управляющих транзисторов, то отдельные функции руки-манипулятора включались и выключались бы в такт посылке последовательного кода. Очевидно, что такая ситуация является недопустимой. Чтобы избежать этого, в схему интерфейса введена вторая ИС 74LS373 – управляемый восьмиканальный электронный ключ.
ИС 74LS373 восьмиканальный ключ имеет восемь входных и восемь выходных шин. Двоичная информация, присутствующая на входных шинах передается на соответствующие выходы ИС только в том случае, если на ИС подан разрешающий сигнал. После выключения разрешающего сигнала текущее состояние выходных шин сохраняется (запоминается). В этом состоянии сигналы на входе ИС не оказывают никакого действия на состояние выходных шин.
После передачи последовательного пакета информации в ИС 74LS164 с вывода D2 параллельного порта подается разрешающий сигнал на ИС 74LS373. Это позволяет передать информацию уже в параллельном коде с входа ИС 74LS174 на ее выходные шины. Состоянием выходных шин управляются соответственно транзисторы TIP 120, которые, в свою очередь, управляют функциями руки-манипулятора. Процесс повторяется при подаче каждой новой команды на руку-манипулятор. Шины параллельного порта D3-D7 управляют непосредственно транзисторами TIP 125.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Создаем робота-андроида своими руками»
Представляем Вашему вниманию похожие книги на «Создаем робота-андроида своими руками» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.





Обсуждение, отзывы о книге «Создаем робота-андроида своими руками» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.