Джон Ловин - Создаем робота-андроида своими руками
Здесь есть возможность читать онлайн «Джон Ловин - Создаем робота-андроида своими руками» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Москва, Год выпуска: 2007, ISBN: 2007, Издательство: Array Литагент «ДМК», Жанр: Технические науки, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Создаем робота-андроида своими руками
- Автор:
- Издательство:Array Литагент «ДМК»
- Жанр:
- Год:2007
- Город:Москва
- ISBN:5-9706-0032-6
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Создаем робота-андроида своими руками: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Создаем робота-андроида своими руками»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Издание окажется крайне полезным для всех любителей электроники и телемеханики как классическое руководство по функционально-блочному построению робототехнических устройств.
Создаем робота-андроида своими руками — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Создаем робота-андроида своими руками», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Преимущества воздушной мышцы
• Малый вес. Воздушная мышца длиной 150 мм с подводящей воздушной трубкой диаметром 4 мм и длиной 450 мм весит приблизительно 10 г.
• Сокращение. Воздушная мышца длиной 150 мм сокращается примерно на 25 мм (около 25 % без учета длины креплений).
• Мощность. Развивает силу порядка 200 г при давлении воздуха 3 кгс. Отношение развиваемой мощности к весу может достигать 400:1.
• Гибкость. Мягкая и гибкая конструкция, которая может быть изогнута вдоль искривленной поверхности без нарушения ее работоспособности.
Применение
Сама конструкция воздушной мышцы делает ее особенно пригодной к использованию в робототехнике и системах автоматизированных движений. В некоторых случаях ими можно заменить сервомоторы или двигатели постоянного тока. Их уникальные свойства – незначительный вес, мощность и гибкость – могут быть комплексно использованы во многих приложениях и применяться для улучшения характеристик существующих пневматических устройств. Одном словом, воздушные мышцы могут быть использованы во многих устройствах, в которых требуются линейные и сократительные движения. Во многих случаях ими можно с успехом заменять пневматические цилиндры.
Как работает воздушная мышца
Воздушная мышца представляет собой длинную трубку, выполненную в виде черного пластикового рукава. Внутрь рукава помещена трубка из мягкой резины. К каждому концу прикреплены металлические зажимы. Каждый конец пластикового рукава свернут в петлю, сложен вдвое и скреплен с помощью металлического зажима. Эти петли используются для крепления воздушной мышцы к другим частям устройства.
При подаче воздуха под давлением мышца сокращается следующим образом. Когда во внутреннюю мягкую резиновую трубку подается сжатый воздух, то она расширяется. Внутренняя трубка оказывает давление на внешний черный пластиковый рукав, что также приводит к его расширению. Когда пластиковый рукав расширяется, то он укорачивается в длину пропорционально увеличению его диаметра. Это приводит к сокращению конструкции воздушной мышцы. Однако важным является то, что для правильной работы мышцы она должна находиться в растянутом положении, когда она не активирована. В противном случае при активации мышцы мы не получим ее сокращения (см. рис. 16.1).
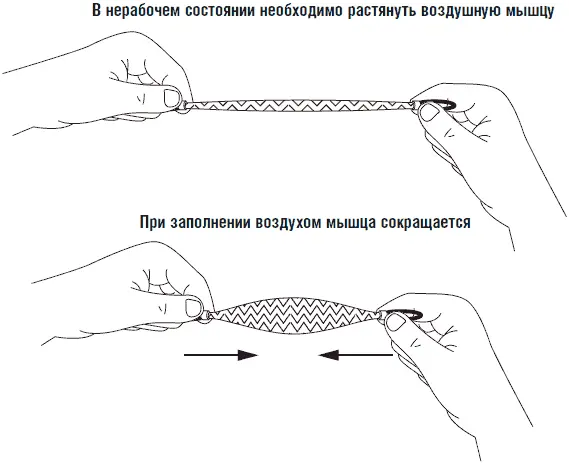
Рис. 16.1 Принцип работы воздушной мышцы
Детали системы воздушной мышцы
На рис. 16.2 приведены рисунки деталей, необходимых для создания воздушной мышцы. Деталь 1 – это собственно воздушная мышца (что очевидно). Деталь 2 – воздушный клапан на три положения. Трехпозиционный воздушный клапан позволяет управлять работой мышцы вручную (см. рис. 16.3).

Рис. 16.2. Необходимые части для экспериментов с воздушной мышцей
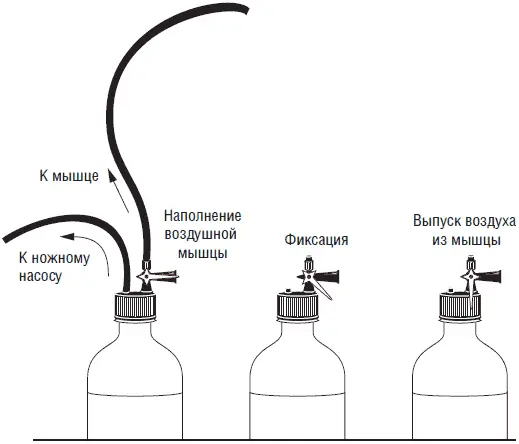
Рис. 16.3. Трехпозиционный воздушный клапан для управления воздушной мышцей
Деталь 3 – переходник крышки бутылки с предохранительным клапаном (клапан открывается при давлении более 4,2 кгс). Переходник крышки бутылки позволяет использовать стандартные полиэтиленовые бутылки из-под газированной воды в качестве воздушных резервуаров. Предохранительный клапан автоматически стравливает избыточный воздух, когда давление превышает заданный предел.
Деталь 4 – полиэтиленовая бутылка из-под газированной воды, используемая в качестве воздушного резервуара. Пластиковая бутылка легко выдерживает давление 3,5 кгс. Я проверял подобные бутылки из-под газированной воды статическим давлением до 7 кгс. Предупреждение: Ни в коем случае не используйте в качестве воздушного резервуара стеклянные бутылки. Небольшая трещина в бутылке или ее случайное падение могут привести к взрыву бутылки, сопровождающемуся разлетом стеклянных осколков. Перекачка пластиковой бутылки может привести только к ее раздуванию.
Деталь 5 – переходник ножного насоса, а деталь 6 – собственно воздушный насос. Обычный ножной насос с манометром способен создать давление в бутылке до 7 кгс. Из-за малой емкости пластиковых бутылок давление в 3,5 кгс достигается в них после четырех «качков» ножного насоса. Воздушная мышца использует очень небольшое количество воздуха, поэтому в небольшой полиэтиленовой бутылке содержится достаточно воздуха для четырех или пяти полных циклов работы. Деталь 7 представляет собой нейлоновые кабельные стяжки, которые используются для быстрого привязывания воздушной мышцы к другим механическим деталям.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Создаем робота-андроида своими руками»
Представляем Вашему вниманию похожие книги на «Создаем робота-андроида своими руками» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.





Обсуждение, отзывы о книге «Создаем робота-андроида своими руками» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.