В. Яценко - Твой первый квадрокоптер - теория и практика
Здесь есть возможность читать онлайн «В. Яценко - Твой первый квадрокоптер - теория и практика» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Санкт-Петербург, Год выпуска: 2016, ISBN: 2016, Издательство: БХВ-Петербург, Жанр: sci_radio, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Твой первый квадрокоптер: теория и практика
- Автор:
- Издательство:БХВ-Петербург
- Жанр:
- Год:2016
- Город:Санкт-Петербург
- ISBN:978-5-9775-3586-1
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Твой первый квадрокоптер: теория и практика: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Твой первый квадрокоптер: теория и практика»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
. Приведено краткое описание устройства и принципа работы систем GPS и Глонасс, а также современных импульсных источников бортового питания и литий-полимерных батарей. Подробно изложен принцип работы и процесс настройки систем, OSD, телеметрии, беспроводного канала
и популярных навигационных модулей
. Рассказано об устройстве и принципах работы интегральных сенсоров и полетного контроллера.
Даны рекомендации по подбору оборудования FPV начального уровня, приведен обзор программ дня компьютеров и смартфонов, применяемых при настройке оборудования квадрокоптера.
Для читателей, интересующихся электроникой, робототехникой, авиамоделизмом
Твой первый квадрокоптер: теория и практика — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Твой первый квадрокоптер: теория и практика», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Настройка при помощи EZ-GUI Ground Station
Запустите приложение EZ-GUI Ground Station и установите соединение с мобильным устройством одним из описанных выше способов: через адаптер Bluetooth или радиомодем. Если опция CAMSTABеще не активирована, войдите в экран Настройки | AUX, отметьте нужные флажки и сохраните в память контроллера.
Затем на экране Настройкинажмите кнопку СЕРВЫ(рис. 6.37).
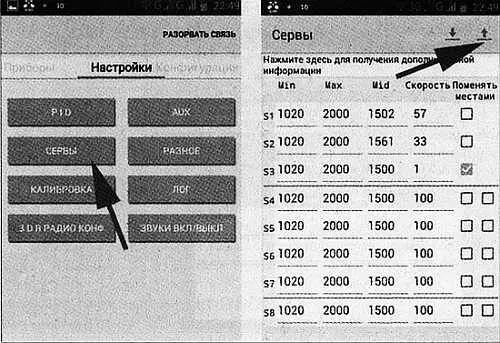
Рис. 6.37. Меню настройки подвеса в EZ-GUI Ground Station
Из контроллера автоматически прочитаются текущие настройки, а именно: минимальное и максимальное значение управляющего сигнала, значение для среднего положения и коэффициент реакции. Чем он больше, тем сильнее реакция подвеса на отклонение рамы. Отрицательное значение коэффициента инвертирует направление отклонения. При настройке следует добиваться того, чтобы при отклонениях рамы угол наклона камеры практически не менялся.
Крайние значения Minи Махнеобходимо уменьшать в том случае, если при максимальных отклонениях подвеса камера во что-то упирается. Значение среднего положения Midиспользуется не только для регулировки нейтрального положения подвеса. В окне настройки этого параметра можно выбрать, через какой канал радиоуправления мы можем вручную управлять положением камеры. По умолчанию стоит прочерк, т. е. подвес работает в полностью автоматическом режиме и стабилизируется относительно нейтрального положения.
Но вы можете захотеть управлять камерой вручную, через каналы AUX. Ведь на пульте этим каналам можно назначить не только тумблеры, но и переменные резисторы. В этом случае при наличии свободных каналов вы можете манипулировать камерой вправо-влево и вверх-вниз, либо по одной из осей. Подвес будет стабилизироваться относительно текущего положения камеры. Новые значения отправляют в контроллер кнопкой "вверх" и сразу после этого они начинают действовать.
Настройка подвеса при помощи конфигуратора MultiWiiConf
После запуска конфигуратора и установления связи с контроллером нажмите кнопку Read. После считывания текущих настроек прошивки в меню появится вкладка SERVO(рис. 6.38).
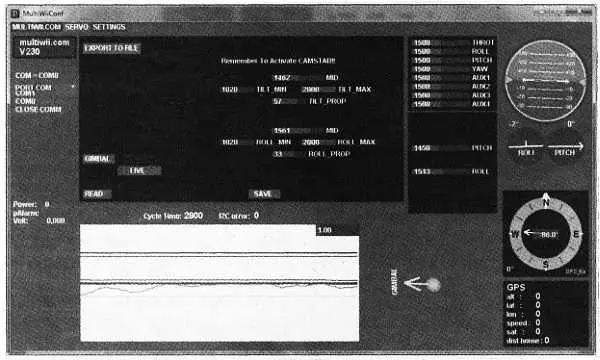
Рис. 6.38. Вкладка SERVOконфигуратора MultiWiiConf
Иногда нужно нажать кнопку дважды, чтобы эта вкладка появилась. Перейдите на вкладку и нажмите кнопку GIMBALL. Настройки автоматически пропитаются из контроллера и отобразятся на экране. Теперь нажмите кнопку GO LIVE, чтобы записывать новые значения в контроллер в режиме реального времени. Перемещая при помощи мыши движки значений MID, можно настроить нейтральное положение камеры. При помощи движков TILT_PROPи ROLL_PROPзадается коэффициент пропорциональности реакции подвеса на отклонение. При помощи движков МIDтакже можно определить каналы для ручного управления камерой. Эта часть интерфейса программы своей изощренной логикой способна шокировать даже подготовленного пользователя. Для перехода в режим определения канала следует уменьшить значение МIDдо 0, а затем начать плавно увеличивать. Теперь в подписи к движку будут отображаться названия каналов. Выбрав нужный канал, нажмите кнопку SAVE.
Настройка подвеса в прошивке MahoWii
В прошивке MahoWii настройка через конфигуратор на момент подготовки книги не была предусмотрена. Все настройки выполняются в файле config.h. К сожалению, при этом для проверки настроек нужно каждый раз записывать прошивку в контроллер. Найдите секцию cam stabilisation и раскомментируйте строку
#define SERVO_TILT
В строках ниже указаны параметры настроек положения сервомашинки TILTt (отклонение по вертикали):
#define TILT_PITCH_MIN 1020
#define TILT_PITCH_MAX 2000
#define TILT_PITCH_MIDDLE 1500
#define TILT_PITCH_PROP 10
//#define TILT_PITCH_AUX_CH AUX4 — раскомментируйте эту строку, чтобы определить канал ручного управления. Можно указать один из AUX1-AUX4.
Далее следуют строки настройки положения сервомашинки ROLL (отклонение по горизонтали):
#define TILT_ROLL_MIN 1020
#define TILT_ROLL_MAX 2000
#define TILT_ROLL_MIDDLE 1500
#define TILT_ROLL_PROP -10
//#define TILT_ROLL_AUX_CH AUX4
Параметры TILT_PITCH_PROP и TILT_ROLL_PROP задают коэффициент пропорциональности для реакции на отклонения рамы. Отрицательное значение инвертирует направление отклонения.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Твой первый квадрокоптер: теория и практика»
Представляем Вашему вниманию похожие книги на «Твой первый квадрокоптер: теория и практика» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.




![Надежда Поврозник - Исторические информационные системы - теория и практика [litres]](/books/429962/nadezhda-povroznik-istoricheskie-informacionnye-sist-thumb.webp)






Обсуждение, отзывы о книге «Твой первый квадрокоптер: теория и практика» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.