В. Яценко - Твой первый квадрокоптер - теория и практика
Здесь есть возможность читать онлайн «В. Яценко - Твой первый квадрокоптер - теория и практика» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Санкт-Петербург, Год выпуска: 2016, ISBN: 2016, Издательство: БХВ-Петербург, Жанр: sci_radio, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Твой первый квадрокоптер: теория и практика
- Автор:
- Издательство:БХВ-Петербург
- Жанр:
- Год:2016
- Город:Санкт-Петербург
- ISBN:978-5-9775-3586-1
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Твой первый квадрокоптер: теория и практика: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Твой первый квадрокоптер: теория и практика»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
. Приведено краткое описание устройства и принципа работы систем GPS и Глонасс, а также современных импульсных источников бортового питания и литий-полимерных батарей. Подробно изложен принцип работы и процесс настройки систем, OSD, телеметрии, беспроводного канала
и популярных навигационных модулей
. Рассказано об устройстве и принципах работы интегральных сенсоров и полетного контроллера.
Даны рекомендации по подбору оборудования FPV начального уровня, приведен обзор программ дня компьютеров и смартфонов, применяемых при настройке оборудования квадрокоптера.
Для читателей, интересующихся электроникой, робототехникой, авиамоделизмом
Твой первый квадрокоптер: теория и практика — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Твой первый квадрокоптер: теория и практика», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Настройка модуля Minim OSD
Мы будем использовать модуль MinimOSD второй версии (рис. 6.39).

Рис. 6.39. Модуль MinimOSDи его компоненты
От первой версии он отличается наличием импульсного источника питания, который из 7-12 В входного напряжения делает +5 В для питания аналоговой части. В предыдущей версии вместо импульсного источника стоял линейный стабилизатор, который при питании напряжением 12 В очень сильно нагревался. А поскольку микросхема видеомиксера МАХ7456 сама нагревается весьма ощутимо, то суммарный нагрев мог привести к выходу модуля из строя, и требовалось монтировать модуль с учетом хорошего обдува. Но даже при обдуве модули иногда выходили из строя в жаркую погоду. Поэтому при покупке обратите внимание на наличие импульсного стабилизатора.
Наличие независимого стабилизатора напряжения позволяет питать аналоговую часть модуля от той же самой батареи 2S-3S, которая питает видеокамеру и передатчик. При этом цифровая часть питается стабилизированным напряжением +5 В через разъем полетного контроллера.
Прежде чем приступить к настройке модуля, необходимо выполнить небольшую доработку модуля (рис. 6.40).
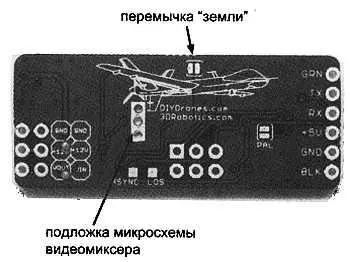
Рис. 6.40. Обратная сторона платы модуля MinimOSD
Металлическая подложка микросхемы должна быть припаяна к плате. Это необходимо для надежного отведения тепла от микросхемы.
Посмотрите на отверстия под микросхемой с обратной стороны платы. Если видно, что подложка микросхемы не припаяна к плате, вы можете сделать это самостоятельно, при помощи паяльника мощностью около 60 Вт. Смочите отверстия под микросхемой спиртоканифольным флюсом и заполните их припоем так, чтобы он достиг подложки. Ни в коем случае не используйте активные кислотосодержащие флюсы!
Далее следует соединить между собой шины цифровой и аналоговой "земли", поместив каплю припоя на площадки для перемычки. Разработчики разделили шины из лучших побуждений, так принято делать в классической практике помехозащиты, чтобы помехи из цифровой части схемы как можно меньше попадали в аналоговый видеотракт. Но на практике это приводит к частым выходам микросхемы видеомиксера из строя. Причиной этого являются переходные процессы, которые возникают в цепях питания при включении. Во время переходных процессов иногда на малые доли секунды потенциал на входах микросхемы оказывается ниже, чем потенциал "земли", т. е. ко входу прикладывается отрицательный потенциал. Оказалось, что микросхема МАХ7456 крайне чувствительна к этому и выходит из строя.
На время программирования и настройки обе части модуля, цифровую и аналоговую, можно питать напряжением +5 В от USB-порта компьютера. Для этого соедините капелькой припоя перемычку питания, показанную на рис. 6.39.
Проверку и настройку модуля MinimOSD можно выполнить без камеры. Достаточно иметь источник питания +5 В и монитор с аналоговым композитным видеовходом. В качестве монитора может также выступать любой телевизор.
Модули MinimOSD и их многочисленные клоны обычно поступают в продажу запрограммированными прошивкой для работы с проектом ArduPilot. Эта прошивка обменивается данными с полетным контроллером через протокол MAVLink (Micro Air Vehicle Link), но проект MultiWii использует собственный протокол MSP (MultiWii Serial Protocol), поэтому прошивку придется заменить. Для этого нам потребуется уже привычный набор: среда программирования Arduino IDЕ и адаптер USB-COM на основе чипа FTDI FT232. Плата модуля OSD разработана для подключения к фирменному адаптеру USB-COM, поэтому выводы на обратной стороне платы помечены в соответствии с цветами проводов адаптера. Вы можете подключить любой адаптер FTDI в соответствии с рис. 6.39. Напомним, что выводы Тх и Rx следует подключать перекрестно: Тх —> Rx, Rx —> Тх.
Последний стабильный релиз прошивки KV_Team_OSD можно скачать по адресу https://code.google.com/p/rush-osd-development/. Архив содержит исходный код прошивки для Arduino IDE, оболочку KV_Team_GUI и шрифт для загрузки в знакогенератор микросхемы МАХ7456. Видеомиксер не генерирует произвольные графические символы, а накладывает на изображение готовые из встроенного знакогенератора. Память знакогенератора независимая и заполняется информацией через микроконтроллер модуля OSD; напрямую из файла компьютера через USB-адаптер этого сделать нельзя.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Твой первый квадрокоптер: теория и практика»
Представляем Вашему вниманию похожие книги на «Твой первый квадрокоптер: теория и практика» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.




![Надежда Поврозник - Исторические информационные системы - теория и практика [litres]](/books/429962/nadezhda-povroznik-istoricheskie-informacionnye-sist-thumb.webp)






Обсуждение, отзывы о книге «Твой первый квадрокоптер: теория и практика» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.