В. Яценко - Твой первый квадрокоптер - теория и практика
Здесь есть возможность читать онлайн «В. Яценко - Твой первый квадрокоптер - теория и практика» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Санкт-Петербург, Год выпуска: 2016, ISBN: 2016, Издательство: БХВ-Петербург, Жанр: sci_radio, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Твой первый квадрокоптер: теория и практика
- Автор:
- Издательство:БХВ-Петербург
- Жанр:
- Год:2016
- Город:Санкт-Петербург
- ISBN:978-5-9775-3586-1
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Твой первый квадрокоптер: теория и практика: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Твой первый квадрокоптер: теория и практика»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
. Приведено краткое описание устройства и принципа работы систем GPS и Глонасс, а также современных импульсных источников бортового питания и литий-полимерных батарей. Подробно изложен принцип работы и процесс настройки систем, OSD, телеметрии, беспроводного канала
и популярных навигационных модулей
. Рассказано об устройстве и принципах работы интегральных сенсоров и полетного контроллера.
Даны рекомендации по подбору оборудования FPV начального уровня, приведен обзор программ дня компьютеров и смартфонов, применяемых при настройке оборудования квадрокоптера.
Для читателей, интересующихся электроникой, робототехникой, авиамоделизмом
Твой первый квадрокоптер: теория и практика — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Твой первый квадрокоптер: теория и практика», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
VOLUME FLIGHT WARNINGS— предельные параметры полета, при которых будет срабатывать предупреждение. Предельное удаление Dist Maxможет быть задано в метрах от 0 до 25 000. По умолчанию задано 5∙100 = 500 м. Максимальная высота Alt Maxзадается в метрах, умноженных на 10. По умолчанию задано 25∙10 = 250 м. Минимальная высота полета задается в диапазоне 0-50 м. Если в этом поле установлено значение, большее ноля, то аварийная индикация сможет сработать только спустя 60 с полета. Этот интервал времени необходим для предотвращения ложных срабатываний при наборе высоты. Сигнализация максимальной высоты готова к срабатыванию сразу после взлета.
GPS SETTINGS— отображение информации GPS. Можно полностью выключить отображение переключателем Оff/Оn GPSили убрать с экрана только координаты переключателем Оff/Оn Coords. Переключатель 180°/360° Headingменяет вид компаса.
МАIN VOLTAGE— индикация напряжения силовой батареи. По аналогии со входом RSSI, переключатель ADC/MWii Inputвыбирает источник информации о напряжении. Минимальное напряжение Minim Volt WARNINGотображается без десятичной точки, т. е. значение 105 соответствует напряжению 10,5 В. Параметр Divider Ratioиспользуется для точной подстройки показаний под реальное напряжение батареи и действует только при использовании встроенного АЦП модуля (ADC).
VIDEO VOLTAGE— индикация напряжения батареи бортового видеопередатчика. Обычно видеокамеру и видеопередатчик питают от отдельной батареи. Модуль OSD может питаться:
• полностью от разъема порта полетного контроллера;
• полностью от видеобатареи, через разъем для подключения видео и встроенный импульсный источник;
• цифровая часть — от разъема порта, аналоговая — от видеобатареи через разъем видео.
UNIT & VIDEO— единицы измерения и система видео. По умолчанию установлены метрическая система и PAL, поэтому менять ничего не надо.
OTHER FUNCTIONS— здесь находятся настройки, для которых нет отдельной секции. Если вы хотите, чтобы при коротком перерыве между полетами, когда вы не отключаете питание, сохранялась статистика полета (время полета, потребленный ток, максимальная достигнутая дистанция и т. д.), то выберите опцию Maintain. В противном случае статистика будет обнуляться при каждом отключении моторов.
Далее следуют частота мигания символов Blink Frequency, предупреждение о максимальной горизонтальной скорости V Speed WARNINGи предупреждение о максимальном угле наклона по оси вперед-назад Pitch Angle WARNING.
HARDWARE ADC'S— включение/отключение встроенных АЦП модуля. Это зависит от того, куда вы подключаете датчики напряжения и тока.
AMPERAGE— настройка датчика тока. На основании показаний датчика тока, напряжения и секундомера вычисляется потребленное количество энергии в миллиампер-часах. Здесь также может быть использован встроенный АЦП, на который подается сигнал с датчика тока. Параметр Sensitivity— это коэффициент пересчета для точной подстройки показаний под реальный потребляемый ток, больший нуля.
Для настройки потребуется достаточно точный дополнительный амперметр, например авиамодельный амперметр-ваттметр. Настройка параметров OfiSet Highи OffSet Lowпредставляет собой довольно хлопотное занятие и зависит от типа применяемого сенсора тока. Эти параметры задают смещение точки ноля АЦП, поскольку обычно при нулевом потребляемом токе с датчика приходит ненулевое значение напряжения.
MULTIWII FLIGHT CONTROL DATA SIMULATOR— в этой секции конфигуратор симулирует данные (рис. 6.42), поступающие из полетного контроллера под управлением MultiWii. Очень удобная опция, позволяющая полностью настроить и проверить работу модуля OSD на столе, не используя пульт радиоуправления и полетный контроллер. При помощи симулятора можно не только привыкнуть к отображаемой информации перед взлетом. В прошивке KV_Team_OSD v.2.3 имеется возможность точной настройки расположения элементов экрана при помощи стиков пульта, и симулятор для этой цели вполне подходит.
В любом случае, перед реальными полетами следует поработать с симулятором, чтобы довести до автоматизма чтение данных, отображаемых на экране. Во время полета у вас может не оказаться времени на поиск важной информации взглядом.
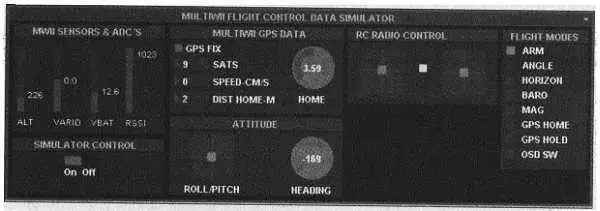
Рис. 6.42. Секция симулятора данных MultiWii
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Твой первый квадрокоптер: теория и практика»
Представляем Вашему вниманию похожие книги на «Твой первый квадрокоптер: теория и практика» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.




![Надежда Поврозник - Исторические информационные системы - теория и практика [litres]](/books/429962/nadezhda-povroznik-istoricheskie-informacionnye-sist-thumb.webp)






Обсуждение, отзывы о книге «Твой первый квадрокоптер: теория и практика» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.