В. Яценко - Твой первый квадрокоптер - теория и практика
Здесь есть возможность читать онлайн «В. Яценко - Твой первый квадрокоптер - теория и практика» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Санкт-Петербург, Год выпуска: 2016, ISBN: 2016, Издательство: БХВ-Петербург, Жанр: sci_radio, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Твой первый квадрокоптер: теория и практика
- Автор:
- Издательство:БХВ-Петербург
- Жанр:
- Год:2016
- Город:Санкт-Петербург
- ISBN:978-5-9775-3586-1
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Твой первый квадрокоптер: теория и практика: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Твой первый квадрокоптер: теория и практика»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
. Приведено краткое описание устройства и принципа работы систем GPS и Глонасс, а также современных импульсных источников бортового питания и литий-полимерных батарей. Подробно изложен принцип работы и процесс настройки систем, OSD, телеметрии, беспроводного канала
и популярных навигационных модулей
. Рассказано об устройстве и принципах работы интегральных сенсоров и полетного контроллера.
Даны рекомендации по подбору оборудования FPV начального уровня, приведен обзор программ дня компьютеров и смартфонов, применяемых при настройке оборудования квадрокоптера.
Для читателей, интересующихся электроникой, робототехникой, авиамоделизмом
Твой первый квадрокоптер: теория и практика — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Твой первый квадрокоптер: теория и практика», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
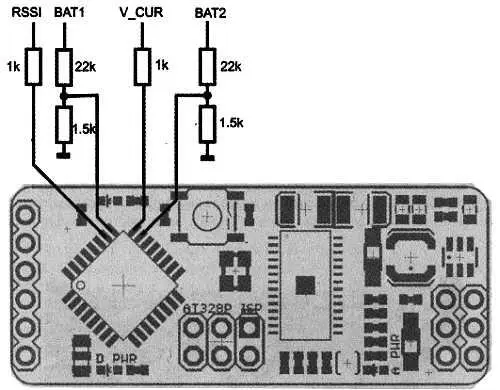
Рис. 6.47. Подключение датчиков тока и напряжения к MinimOSD:
ВАТ1— батарея видеотракта; ВАТ2— силовая батарея; V_CUR— напряжение с выхода датчика тока; RSSI— напряжение или импульсы ШИМ с выхода RSSI приемника
Резисторы делителя напряжения для батареи видеотракта удобно припаивать непосредственно к выводам питания аналоговой части модуля, как показано на рис. 6.48.
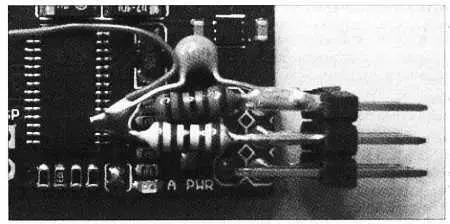
Рис. 6.48. Монтаж делителя напряжения батареи видеотракта
Керамический конденсатор номиналом 0,1 мкФ снижает помехи в измерительной цепи, но использовать его не обязательно. После подключения делителей необходимо настроить калибровочные коэффициенты, чтобы отображаемое на экране напряжение соответствовало реальному напряжению батареи. Подключите плату к компьютеру через адаптер и на линии ВАТ1 и ВАТ2 подайте заведомо известное напряжение в диапазоне 11–12 В, измеренное при помощи вольтметра. Меняя константы Divider Ratio, добейтесь, чтобы напряжение на экране максимально соответствовало реальному. Допускается периодическое мерцание значения после запятой. Это связано с тем, что в прошивке не фильтруются погрешности измерения и пересчета с плавающей точкой.
Отображение показаний датчика тока настраивается иначе. Если используется двунаправленный сенсор тока(обычно низкоомный шунт), то установите Highв 0 и начните менять параметр Lowс 0 и далее 1, 2…. таким образом, чтобы при отсутствии нагрузки отображалось нулевое значение тока. Обычно значений 1 или 2 достаточно.
Если используется однонаправленный сенсор тока(обычно на магниторезистивном датчике), установите High= 2 и Low= 0. Проверьте индикацию нулевого тока, отображаемое значение должно быть близким к нулю. Если это не так, установите High= 1 и Low= 255. Затем постепенно уменьшая Low= 254, 253, 252…., добейтесь максимальной близости показаний к нулю при отсутствии нагрузки.
Далее, используя дополнительный амперметр или амперметр/ваттметр, замеряют ток под нагрузкой и, меняя константу Sensitivity, добиваются правильных показаний.
После настройки и калибровки OSD можно смонтировать модуль на коптере. По опыту автора, несмотря на довольно сильный нагрев микросхемы МАХ7456, модуль OSD можно затягивать в термоусадочную трубку, и это не приведет к перегреву. Важно лишь, чтобы модуль был смонтирован на открытом месте с хорошим обдувом. Желательно сохранить возможность подключения адаптера USB-COM на случай настройки или перепрошивки "на борту".
При правильном подключении соединительных проводников между камерой, модулем OSD, контроллером и передатчиком видеосистема начнет работать сразу.
Если с контроллера не поступают данные на OSD, убедитесь, что модуль соединен с портом SERIAL3 по схеме Rx — > Тх, Тх — > Rx и в настройках прошивки полетного контроллера указана скорость этого порта 115 200 бод. При использовании некоторых камер модуль неправильно определяет стандарт видеосигнала и переходит в режим NTSC, хотя на самом деле поступает сигнал стандарта PAL. В этом случае следует запаять перемычку PAL с обратной стороны платы (см. рис. 6.40).
Подключение датчиков тока и напряжения к контроллеру
Подключение датчиков тока и напряжения непосредственно к полетному контроллеру менее предпочтительно с точки зрения выхода контроллера из строя и сложности настройки. Но иногда необходимо это сделать, например, если для отображения телеметрии используется не экран OSD, а другие средства.
В случае использования готового измерительного модуля, аналогичного представленному на рис. 3.8, сигналы с его выходов можно подавать непосредственно на аналоговые входы полетного контроллера. Если имеется только датчик тока, то схема входных цепей аналогична показанной на рис. 6.47. Измеряемое напряжение силовой батареи необходимо подавать только через резистивный делитель! В противном случае аналоговый вход контроллера выйдет из строя. В стандартной схеме подключения измеряемое напряжение с выхода делителя или модуля подается на вход А1 полетного контроллера, а напряжение с выхода датчика тока — на вход А2. В комментарии внутри кода прошивки предлагается использовать иные номиналы резисторов (33 и 51 кОм), с меньшим коэффициентом деления. Но при указанных номиналах на вход датчика нельзя подавать напряжение 12 В с батареи, т. к. на выходе делителя будет около 8 В.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Твой первый квадрокоптер: теория и практика»
Представляем Вашему вниманию похожие книги на «Твой первый квадрокоптер: теория и практика» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.




![Надежда Поврозник - Исторические информационные системы - теория и практика [litres]](/books/429962/nadezhda-povroznik-istoricheskie-informacionnye-sist-thumb.webp)






Обсуждение, отзывы о книге «Твой первый квадрокоптер: теория и практика» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.