В. Яценко - Твой первый квадрокоптер - теория и практика
Здесь есть возможность читать онлайн «В. Яценко - Твой первый квадрокоптер - теория и практика» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Санкт-Петербург, Год выпуска: 2016, ISBN: 2016, Издательство: БХВ-Петербург, Жанр: sci_radio, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Твой первый квадрокоптер: теория и практика
- Автор:
- Издательство:БХВ-Петербург
- Жанр:
- Год:2016
- Город:Санкт-Петербург
- ISBN:978-5-9775-3586-1
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Твой первый квадрокоптер: теория и практика: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Твой первый квадрокоптер: теория и практика»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
. Приведено краткое описание устройства и принципа работы систем GPS и Глонасс, а также современных импульсных источников бортового питания и литий-полимерных батарей. Подробно изложен принцип работы и процесс настройки систем, OSD, телеметрии, беспроводного канала
и популярных навигационных модулей
. Рассказано об устройстве и принципах работы интегральных сенсоров и полетного контроллера.
Даны рекомендации по подбору оборудования FPV начального уровня, приведен обзор программ дня компьютеров и смартфонов, применяемых при настройке оборудования квадрокоптера.
Для читателей, интересующихся электроникой, робототехникой, авиамоделизмом
Твой первый квадрокоптер: теория и практика — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Твой первый квадрокоптер: теория и практика», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Существенным недостатком этих датчиков является выраженная зависимость результатов измерения от температуры окружающей среды и большой разброс выходных данных между экземплярами. Для термокомпенсации внутрь корпуса встраивают терморезистор и при измерениях учитывают его сопротивление в качестве компенсирующего параметра. Для устранения конструктивной неоднородности каждый экземпляр интегрального барометра калибруют на заводе, записывая в его память калибровочные константы.
На выходе барометра мы получаем не абсолютное значение давления, а некое "сырое" значение, из которого давление рассчитывается путем вычислений с плавающей точкой, учитывая калибровочные константы и текущую температуру корпуса. Формулы для расчетов приводятся в спецификации микросхемы.
Применительно к квадрокоптерам, нас обычно интересует не высота над уровнем моря, а высота относительно точки взлета. Поэтому в момент активации моторов перед взлетом текущее давление воздуха принимается соответствующим нулевой высоте. К сожалению, даже в течение одного 10-минутного полета атмосферное давление может измениться настолько сильно, что это будет соответствовать перепаду высоты 2–3 м. Особенно это характерно для неустойчивой предгрозовой погоды.
Барометр следует защищать от воздействия прямых потоков воздуха. Обычно для этого используют кусочек крупнопористого поролона, которым прикрывают отверстие сенсора, или помещают полетный контроллер в защитный кожух. Также следует защищать барометр от попадания прямых солнечных лучей на сенсор через отверстие в корпусе. Теоретически современные интегральные барометры способны измерять высоту с точностью в несколько сантиметров, однако когда барометр смонтирован, на квадрокоптере и рядом с ним несущие винты прокачивают потоки воздуха, а на это накладываются флуктуации плотности воздушных масс разной температуры, такую точность реализовать практически невозможно. К вибрациям барометры не чувствительны.
Устройство ультразвукового сонара
Ультразвуковой сонар (датчик расстояния) состоит из генератора ультразвука, излучателя, приемника и усилителя-формирователя выходного сигнала (рис. 2.7).
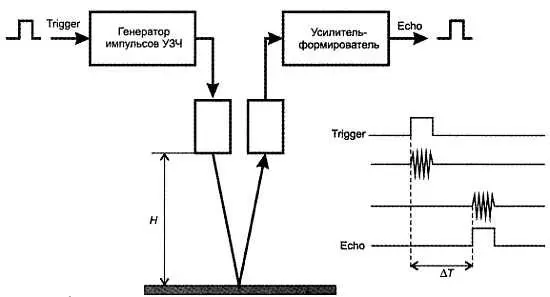
Рис. 2.7. Устройство ультразвукового сонара
Простейшие сонары не содержат собственный микроконтроллер и работают под управлением внешнего устройства. Когда на вход Triggerприходит пусковой импульс, электронная схема сонара генерирует короткий пакет колебаний ультразвуковой частоты, поступающий на излучатель. Отразившись от твердой поверхности, колебания поступают на приемник и далее на усилитель-формирователь, на выходе которого формируется импульс Echo(эхо) с логическим уровнем. Внешнее устройство вычисляет расстояние до поверхности через интервал времени между фронтами пускового импульса и эха по формуле

где v — скорость звука, ΔТ — разность времени между фронтами пуска и эха. Поскольку звук дважды проходит расстояние Н , мы берем 1/2 вычисленного значения.
Более сложные сонары содержат встроенный контроллер, самостоятельно выполняют процесс измерения, производят фильтрацию и усреднение результатов измерения и выдают готовое значение расстояния по протоколу I 2С или SPI.
Как барометр, так и сонар обладают специфическими недостатками. При полете на малой высоте квадрокоптер создает не только эффект воздушной подушки, но и зону завихрений и нестабильного давления вокруг себя. Чем крупнее квадрокоптер, тем заметнее этот эффект. Как показывает опыт, барометр квадрокоптера среднего размера начинает работать стабильно на высоте более пяти диагоналей рамы, т. е. более 2 м от земной поверхности.
Популярные ультразвуковые сонары измеряют дистанцию с точностью до одного-двух сантиметров, но работают на очень ограниченном расстоянии до отражающей поверхности, как правило, не более 3–4 м. Сонарам безразличны потоки воздуха, но они крайне чувствительны к качеству отражающей поверхности. Трава, вспаханная земля, снег, рябь на воде — такие поверхности рассеивают ультразвуковой импульс либо вносят большие искажения. Поэтому применение сонара оправдано при полетах в закрытых залах, где высота полета как раз соответствует рабочей дальности сонара, а пол хорошо отражает ультразвук. Нужно также учитывать, что сонар правильно показывает высоту при горизонтальном положении коптера. Как только рама наклоняется и импульс ультразвука отражается в сторону под углом к полу, сонар становится бесполезен.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Твой первый квадрокоптер: теория и практика»
Представляем Вашему вниманию похожие книги на «Твой первый квадрокоптер: теория и практика» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.




![Надежда Поврозник - Исторические информационные системы - теория и практика [litres]](/books/429962/nadezhda-povroznik-istoricheskie-informacionnye-sist-thumb.webp)






Обсуждение, отзывы о книге «Твой первый квадрокоптер: теория и практика» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.