В. Яценко - Твой первый квадрокоптер - теория и практика
Здесь есть возможность читать онлайн «В. Яценко - Твой первый квадрокоптер - теория и практика» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Санкт-Петербург, Год выпуска: 2016, ISBN: 2016, Издательство: БХВ-Петербург, Жанр: sci_radio, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Твой первый квадрокоптер: теория и практика
- Автор:
- Издательство:БХВ-Петербург
- Жанр:
- Год:2016
- Город:Санкт-Петербург
- ISBN:978-5-9775-3586-1
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Твой первый квадрокоптер: теория и практика: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Твой первый квадрокоптер: теория и практика»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
. Приведено краткое описание устройства и принципа работы систем GPS и Глонасс, а также современных импульсных источников бортового питания и литий-полимерных батарей. Подробно изложен принцип работы и процесс настройки систем, OSD, телеметрии, беспроводного канала
и популярных навигационных модулей
. Рассказано об устройстве и принципах работы интегральных сенсоров и полетного контроллера.
Даны рекомендации по подбору оборудования FPV начального уровня, приведен обзор программ дня компьютеров и смартфонов, применяемых при настройке оборудования квадрокоптера.
Для читателей, интересующихся электроникой, робототехникой, авиамоделизмом
Твой первый квадрокоптер: теория и практика — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Твой первый квадрокоптер: теория и практика», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
При гироскопической стабилизации оператор должен выровнять коптер вручную. На практике, квадрокоптер, оснащенный только гироскопами, не может стабильно висеть более минуты даже в помещении. Далее нужно вручную парировать его дрейф. Свое влияние на показания гироскопов оказывают изменение температуры корпуса и угловые ускорения, возникающие при вращении Земли. Следовательно, для более продвинутой конструкции полетного контроллера необходим датчик, показывающий положение квадрокоптера относительно земной поверхности (если точнее, то относительно вектора ускорения свободного падения, который всегда направлен перпендикулярно земной поверхности, к центру Земли). Такой датчик есть в каждом современном смартфоне или планшете и называется акселерометром .
Принцип работы интегрального акселерометра
Акселерометр — это МЕМС-устройство, которое измеряет линейные ускорения. В состав интегрального акселерометра входят чувствительный элемент и электронная часть, осуществляющая предварительную обработку сигнала.
В очень упрощенном виде чувствительный элемент представляет собой токопроводящий грузик на гибком подвесе, помещенный между двумя электродами (рис. 2.3).
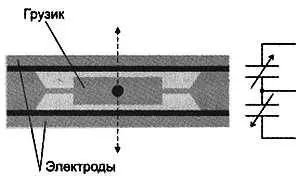
Рис. 2.3. Устройство чувствительного элемента акселерометра и его эквивалентная электрическая схема
Грузик и электроды образуют два конденсатора. При смещении грузика под действием ускорения емкость одного конденсатора уменьшается, а другого увеличивается. Так как заряд конденсаторов постоянен, то изменяется напряжение на выводах конденсаторов. Это изменение измеряется встроенной электронной схемой, результат измерения в цифровом виде выдается в ответ на запрос внешнего вычислительного устройства. Результат может быть как положительным, так и отрицательным в зависимости от направления вектора ускорения.
Реальный сенсор акселерометра устроен значительно сложнее, в нем детали конструкции выполняют несколько функций одновременно. Но для понимания принципа работы упрощенной схемы достаточно.
Все современные интегральные акселерометры, как правило, трехосевые. Три сенсора расположены внутри одного корпуса микросхемы перпендикулярно осям x, у и z . Вектор действующего на устройство ускорения вычисляется микроконтроллером через проекции вектора на три оси. Даже если устройство находится в покое, на него действует ускорение свободного падения g . Вектор g → направлен вертикально вниз, к центру Земли. Если корпус акселерометра расположен строго горизонтально, то вектор земного тяготения совпадает с осью z и ускорение действует только на один сенсор. Но стоит наклонить акселерометр, как появятся составляющие вектора g → по осям х и у , а составляющая по оси z пропорционально уменьшится. На основании величин проекций вектора земного тяготения на оси и их знака микроконтроллер вычисляет наклон квадрокоптера. Именно по такому принципу ваш смартфон или планшет определяет ориентацию экрана.
Поскольку датчики акселерометра не идеально одинаковые и печатная плата может быть смонтирована не идеально ровно, перед началом эксплуатации акселерометр необходимо откалибровать: поместить устройство строго горизонтально и сообщить бортовому контроллеру, что текущие показания акселерометра соответствуют горизонтали. Соответствующие корректировочные константы записываются во встроенную память микроконтроллера. В этом состоит различие между процедурами калибровки гироскопа и акселерометра: гироскоп калибруют после каждого включения питания, а также при длительном перерыве между взлетами, а акселерометр однократно, после окончания сборки коптера. После смены версии прошивки контроллера или изменения конструкции квадрокоптера акселерометр необходимо откалибровать заново!
Существенным недостатком MEMS-акселерометров является высокая чувствительность к вибрациям. Но вибрации — неизменный спутник винтокрылых аппаратов, поэтому необходимо принимать специальные меры по виброизоляции, а также балансировке воздушных винтов и моторов.
Именно появление доступных по цене трехосевых акселерометров определило взрывной рост популярности квадрокоптеров. Еще несколько лет назад акселерометры были, в основном, двухосевыми, а трехосевые стоили весьма дорого и были редкостью. С появлением игровой приставки Nintendo Wii и игровых манипуляторов WiiMotionPlus и Nunchak ситуация кардинально изменилась. Малогабаритные трехосевые интегральные акселерометры и гироскопы стали доступны по вполне разумным ценам. Первые энтузиасты покупали платы манипуляторов Nintendo и подключали их к вычислителю на основе модуля Arduino. Затем к процессу подключились китайские производители, начавшие массовое производство полетных контроллеров с полным наборов сенсоров "на борту". Отсюда исторически происходит название одной из самых популярных открытых прошивок MultiWii и платы контроллера MultiWii All-In-One (MWIAIOP).
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Твой первый квадрокоптер: теория и практика»
Представляем Вашему вниманию похожие книги на «Твой первый квадрокоптер: теория и практика» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.




![Надежда Поврозник - Исторические информационные системы - теория и практика [litres]](/books/429962/nadezhda-povroznik-istoricheskie-informacionnye-sist-thumb.webp)






Обсуждение, отзывы о книге «Твой первый квадрокоптер: теория и практика» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.