В. Яценко - Твой первый квадрокоптер - теория и практика
Здесь есть возможность читать онлайн «В. Яценко - Твой первый квадрокоптер - теория и практика» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Санкт-Петербург, Год выпуска: 2016, ISBN: 2016, Издательство: БХВ-Петербург, Жанр: sci_radio, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Твой первый квадрокоптер: теория и практика
- Автор:
- Издательство:БХВ-Петербург
- Жанр:
- Год:2016
- Город:Санкт-Петербург
- ISBN:978-5-9775-3586-1
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Твой первый квадрокоптер: теория и практика: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Твой первый квадрокоптер: теория и практика»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
. Приведено краткое описание устройства и принципа работы систем GPS и Глонасс, а также современных импульсных источников бортового питания и литий-полимерных батарей. Подробно изложен принцип работы и процесс настройки систем, OSD, телеметрии, беспроводного канала
и популярных навигационных модулей
. Рассказано об устройстве и принципах работы интегральных сенсоров и полетного контроллера.
Даны рекомендации по подбору оборудования FPV начального уровня, приведен обзор программ дня компьютеров и смартфонов, применяемых при настройке оборудования квадрокоптера.
Для читателей, интересующихся электроникой, робототехникой, авиамоделизмом
Твой первый квадрокоптер: теория и практика — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Твой первый квадрокоптер: теория и практика», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Благодаря тому, что акселерометр определяет положение квадрокоптера относительно горизонтали, становится возможным автоматическое выравнивание устройства (автогоризонт). Как только ручки управления на пульте вернулись в нейтральное положение, полетный контроллер воспринимает это как команду выровнять квадрокоптер в горизонтальное положение, которое вы задали при калибровке.
Есть и другие положительные моменты в использовании акселерометра. Предположим, командой с пульта мы наклонили квадрокоптер для полета вперед. Чтобы компенсировать уменьшение вертикальной тяги, необходимо равномерно увеличить обороты всех моторов пропорционально наклону. При отсутствии акселерометров можно приблизительно вычислить наклон квадрокоптера через угловое ускорение, его продолжительность и величину управляющего сигнала с пульта. Но проще и точнее угол наклона вычисляется по данным с акселерометров.
Разумеется, акселерометры измеряют не только ускорение свободного падения, но и линейные ускорения по любой из осей при движении квадрокоптера. В ряде случаев эта информация тоже бывает полезна.
С другой стороны, когда надо быстро определить скорость и знак углового ускорения, проще использовать гироскоп, который так же выдает эти данные более точно и в готовом виде. Таким образом, каждый сенсор хорош для своей задачи. В современных MEMS-микросхемах трехосевые гироскопы и трехосевые акселерометры часто объединяют в одном корпусе с размерами около 3x3x1 мм. В этом же корпусе находится электронная схема для предварительной цифровой обработки данных, с внешним протоколом обмена SPI или I 2С.
Чтобы определить курсовое направление рамы квадрокоптера, нужен еще один датчик — интегральный компас , или магнитометр . Квадрокоптер может лететь как угодно, вбок, назад, или по диагонали, поэтому "вперед" в нашем случае — это условное направление рамы и контроллера, относительно которого определяется фактическое направление полета. На плате контроллера направление "вперед" обычно обозначается стрелкой.
Принцип работы интегрального магнитометра (компаса)
В основе конструкции интегрального магнитометра (рис. 2.4) лежит анизотропный магниторезистивный эффект. Чувствительный элемент изготавливается из пермаллоевой пленки, способной изменять свое сопротивление в зависимости от направления протекающего через нее тока и направления вектора ее намагниченности. В свою очередь, вектор намагниченности пленки определяется направлением силовых линий магнитного поля, в котором находится чувствительный элемент.
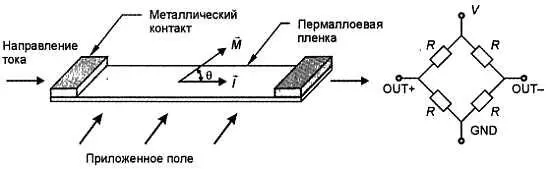
Рис. 2.4. Устройство интегрального магнитометра
Четыре пермаллоевых элемента соединяются в измерительный мост (см. рис. 2.4). При подаче постоянного напряжения на мост датчик начинает измерять интенсивность внешнего магнитного поля, направленного вдоль его чувствительной оси. Мостовой датчик имеет ось предпочтительного намагничивания, так называемую легкую ось, и наиболее чувствителен к полям, направленным перпендикулярно этой оси. В квадрокоптерах применяются трехосевые интегральные магнитометры, состоящие из трех независимых датчиков, ориентированных по трем ортогональным осям и электронной схемы. В спецификации магнитометра всегда указывают направление осей относительно корпуса (рис. 2.5).
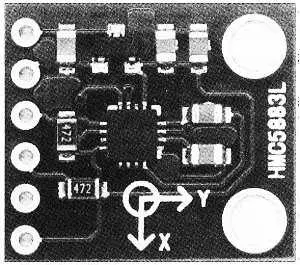
Рис. 2.5. Магнитометр HMC5883Lна плате расширения
Магнитометры не подвержены вибрации, но на их показания влияют внешние близко расположенные металлические предметы. Помехи можно разделить на три основных класса.
• "Искажения твердого железа" (Hard Iron Distortion) — к магнитному полю земли добавляется постоянное магнитное поле от намагниченных предметов, например магнита звукоизлучателя. Намагниченными могут быть даже выводы радиодеталей, изготовленные из луженого железа. Эта постоянная составляющая может быть исключена при калибровке.
• "Искажения мягкого железа" (Soft Iron Distortion) — магнитное поле искажается посторонними предметами, не имеющими собственной намагниченности. Например, сплавы никеля, пермаллой искажают силовые линии поля. Такие искажения зависят от положения объекта в пространстве и труднее компенсируются. К счастью, в конструкции квадрокоптера обычно не бывает таких предметов. Детали из сплавов алюминия и меди не вносят искажения.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Твой первый квадрокоптер: теория и практика»
Представляем Вашему вниманию похожие книги на «Твой первый квадрокоптер: теория и практика» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.




![Надежда Поврозник - Исторические информационные системы - теория и практика [litres]](/books/429962/nadezhda-povroznik-istoricheskie-informacionnye-sist-thumb.webp)






Обсуждение, отзывы о книге «Твой первый квадрокоптер: теория и практика» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.