В. Яценко - Твой первый квадрокоптер - теория и практика
Здесь есть возможность читать онлайн «В. Яценко - Твой первый квадрокоптер - теория и практика» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Санкт-Петербург, Год выпуска: 2016, ISBN: 2016, Издательство: БХВ-Петербург, Жанр: sci_radio, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Твой первый квадрокоптер: теория и практика
- Автор:
- Издательство:БХВ-Петербург
- Жанр:
- Год:2016
- Город:Санкт-Петербург
- ISBN:978-5-9775-3586-1
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Твой первый квадрокоптер: теория и практика: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Твой первый квадрокоптер: теория и практика»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
. Приведено краткое описание устройства и принципа работы систем GPS и Глонасс, а также современных импульсных источников бортового питания и литий-полимерных батарей. Подробно изложен принцип работы и процесс настройки систем, OSD, телеметрии, беспроводного канала
и популярных навигационных модулей
. Рассказано об устройстве и принципах работы интегральных сенсоров и полетного контроллера.
Даны рекомендации по подбору оборудования FPV начального уровня, приведен обзор программ дня компьютеров и смартфонов, применяемых при настройке оборудования квадрокоптера.
Для читателей, интересующихся электроникой, робототехникой, авиамоделизмом
Твой первый квадрокоптер: теория и практика — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Твой первый квадрокоптер: теория и практика», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
• Динамические или вихревые помехи. Это специфическая особенность электрических летательных аппаратов, особенно коптеров. Мощные токи, протекающие через проводники силовых цепей и батарею, порождают магнитные поля в окружающем пространстве. Причем напряженность этих полей постоянно меняется в зависимости от нагрузки на моторы.
Иногда магнитные помехи настолько сильны, что делают невозможным использование компаса и даже способны привести к аварии. К сожалению, переменные магнитные поля невозможно скомпенсировать программно и приходится применять специальные конструктивные меры. Для уменьшения наводок микросхему компаса стараются выносить с платы контроллера и поднимать вверх на 10–20 см над рамой. При укладке силовых проводов следует избегать образования петель, все провода должны иметь минимальную длину. Силовые провода рекомендуется перекручивать. Впрочем, в квадрокоптерах начального уровня вполне можно обходиться без компаса и при наличии магнитных помех просто отключать его в настройках.
Малогабаритные контроллеры, предназначенные для полетов внутри помещения, по очевидной причине компас не содержат.
Перед началом полетов магнитометр необходимо откалибровать, проведя процедуру вращения коптера по всем осям. Детали этой процедуры могут зависеть от применяемой прошивки контроллера.
Благодаря наличию компаса возможен интересный режим полета, именуемый Headfree. В этом режиме фиксируется курсовое положение квадрокоптера в момент активации моторов. Если в процессе полета развернуть раму квадрокоптера по Yaw, то условное направление "вперед", зафиксированное при взлете, не изменится. При наклоне правого стика пульта вперед квадрокоптер всегда будет лететь вперед, при наклоне вправо — всегда вправо и т. д., независимо от того, как в данный момент развернута рама. Считается, что этот режим удобен для начинающего пилота, а также при полетах на большом удалении, без видеоканала и средств телеметрии, когда визуальный контроль над положением рамы затруднен. Если пилот случайно развернул квадрокоптер, то это не отразится на управлении и поможет избежать аварии.
Используя компас, при настройке квадрокоптера не забудьте указать такой параметр, как магнитное склонение (не путайте с магнитным наклонением) для своей местности. Магнитное склонение — это угол между географическим и магнитным меридианами в точке земной поверхности. Магнитное склонение считается положительным, если северный конец магнитной стрелки компаса отклонен к востоку от географического меридиана, и отрицательным — если к западу. Значение магнитного склонения используется для определения истинного меридиана до показанию магнитного компаса. Узнать значение магнитного склонения для своей местности можно на сайте www.magnetic-declination.comили http://www.ngdc.noaa.gov/geomag-web/. Обратите внимание, что сервисы дают значение в градусах и минутах, но при настройке компаса используется значение в градусах и десятичных долях градуса.
Остался еще один важный параметр полета — высота. Стабилизация высоты важна как для комфортного управления квадрокоптером, так и для безопасного полета, особенно в режиме автоматического возврата к точке старта по GPS. Для измерения высоты в квадрокоптерах используют либо интегральный барометр, либо внешний ультразвуковой сонар, либо оба устройства сразу. Поскольку они оба выполняют одинаковую задачу, мы немного забежим вперед и рассмотрим достоинства и недостатки ультразвукового сонара в этой главе, хоть сонар и является дополнительным оборудованием.
Устройство интегрального барометра
Измерение высоты полета барометрическим методом основано на зависимости атмосферного давления от высоты. Чем больше высота, тем ниже атмосферное давление. В миниатюрных интегральных барометрах применяется, как правило, тензорезисторный либо пьезорезонансный датчик. В первом случае чувствительным элементом является тензорезистор (рис. 2.6), изменяющий свое сопротивление в зависимости от степени деформации под воздействием атмосферного давления. Во втором случае на пьезоэлемент подают переменное электрическое напряжение, заставляя его колебаться под действием обратного пьезоэффекта. Собственная резонансная частота элемента, — при которой напряжение на электродах пьезоэлемента максимально, зависит от степени деформации элемента.
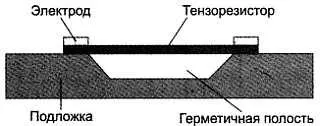
Рис. 2.6. Устройство тензорезисторного датчика атмосферного давления
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Твой первый квадрокоптер: теория и практика»
Представляем Вашему вниманию похожие книги на «Твой первый квадрокоптер: теория и практика» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.




![Надежда Поврозник - Исторические информационные системы - теория и практика [litres]](/books/429962/nadezhda-povroznik-istoricheskie-informacionnye-sist-thumb.webp)






Обсуждение, отзывы о книге «Твой первый квадрокоптер: теория и практика» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.