Петр Асташенков - Что такое бионика
Здесь есть возможность читать онлайн «Петр Асташенков - Что такое бионика» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Москва, Год выпуска: 1963, Издательство: Воениздат, Жанр: История, Прочая научная литература, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Что такое бионика
- Автор:
- Издательство:Воениздат
- Жанр:
- Год:1963
- Город:Москва
- ISBN:нет данных
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Что такое бионика: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Что такое бионика»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Что такое бионика — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Что такое бионика», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Положение регулирующего органа меняется под воздействием возмущений синусоидальной формы с частотой ω. Пусть при первом перемещении регулирующего органа он попал в точку 1 графика. При этом на выход дискриминатора (различитель фазы и частоты) поступит синусоидальное колебание с частотой ω, изображенное в точке 1 . Если при втором перемещении регулирующий орган попадет в точку 2 , то на выходе появится сигнал малой амплитуды и удвоенной частоты. И наконец, при попадании в точку 3 появится колебание частоты ω, но в противофазе с колебанием в точке 1. Дискриминатор может выделить максимум, имея приведенную в табл. 1 программу, или «логику», работы.
Таблица 1
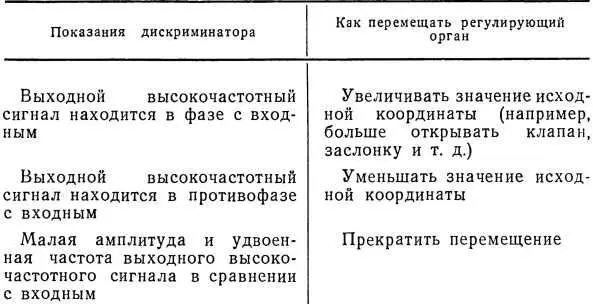
Ее обычно именуют алгоритмом управляющего устройства.
Чтобы реализовать такую «логику» работы схемы, нужно иметь фазочувствительный выпрямитель (дискриминатор), команды которого приводили бы в действие электродвигатель, а он в свою очередь открывал бы клапаны, перемещал заслонки или другие какие-либо регулирующие устройства.
Другой путь поисков наивыгоднейших характеристик состоит в использовании свойства запоминания. Выше рассматривались процессы накопления и сохранения информации, происходящие по аналогии с использованием информации мозгом, его памятью. В данном случае может быть использована схема, показанная на рис. 11.
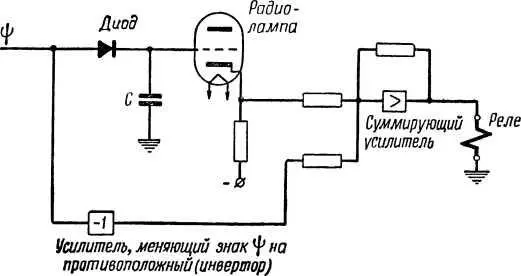
Рис. 11. Схема управляющего устройства, основанного на принципе запоминания наибольшего показателя ψ.
К электродам сетка-катод радиолампы через диод подводится электрическое напряжение (показатель Ψ). Пусть при этом величина ψ меняется, как показано на рис. 10, от точки 1 к точкам 2 и 3. Когда ψ достигнет максимального значения, запоминающий конденсатор С зарядится, «запомнит» это значение. Когда напряжение начнет уменьшаться, диод запирается. Суммирующий усилитель, сравнивающий напряжения в цепи катода лампы и инвертора, дает команду реле. Оно срабатывает и заставляет двигатель, а за ним и регулирующий орган двигаться в обратную сторону. Опять будет пройден максимум, и как только величина ψ начнет падать, снова реле заставит двигаться регулирующий орган обратно. Таким образом, в системе будут происходить колебания вокруг наибольшего значения и среднее положение регулирующего органа будет соответствовать этому значению.
С запоминанием связан и циклический поиск в системах шагового типа. В этом случае приходится запоминать исходную величину выходного сигнала ψ, изменения положения регулирующего органа АХ, новое значение выходной величины ψ + Δψ. На графике рис. 12 показана зависимость показателя системы ψ от перемещения регулирующего органа X.
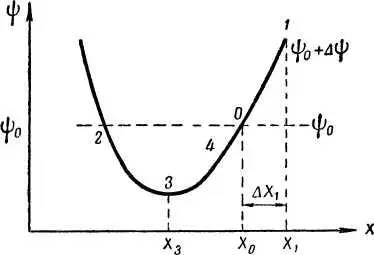
Рис. 12. График зависимости показателя системы ψ от перемещения регулирующего органа X при циклическом поиске в системе шагового типа.
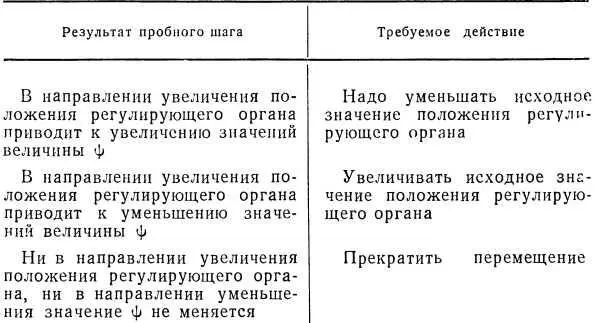
Пусть исходное положение регулирующего органа в точке О. Делается пробный шаг АХ. При перемещении в точку 1 показатель системы возрастает, становится ψ + Δψ. При исходном положении в точке 2 значение ψ при пробном шаге в точке 3 уменьшается. По знаку Δψ можно определить направление движения регулирующего органа. Метод такого поиска называется циклическим потому, что шаг АХ задается специальным коммутатором циклически через равные промежутки времени, а направление этого шага и величина неизменны. Алгоритм («логику») работы управляющего устройства можно представить в виде табл. 2.
Таблица 2
Для реализации изложенной выше «логики» может быть применена схема, содержащая объект регулирования, тактовый генератор и устройство управления. В свою очередь устройство управления имеет запоминающее устройство, двигатель, перемещающий управляющий орган, и устройство для определения, куда дальше перемещать этот орган для поиска наивыгоднейшего значения (рис. 13).
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Что такое бионика»
Представляем Вашему вниманию похожие книги на «Что такое бионика» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.


Обсуждение, отзывы о книге «Что такое бионика» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.