Петр Асташенков - Что такое бионика
Здесь есть возможность читать онлайн «Петр Асташенков - Что такое бионика» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Москва, Год выпуска: 1963, Издательство: Воениздат, Жанр: История, Прочая научная литература, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Что такое бионика
- Автор:
- Издательство:Воениздат
- Жанр:
- Год:1963
- Город:Москва
- ISBN:нет данных
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Что такое бионика: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Что такое бионика»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Что такое бионика — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Что такое бионика», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Весьма распространены в технике системы автоматического управления с обратной связью. Как это уже отмечалось выше, на выходе объекта автоматического управления происходит вычитание из выходной регулируемой величины заданного ее значения. По величине отклонения регулятор вырабатывает управляющий сигнал, сводящий отклонение к нулю.
Однако для управления более сложными и менее изученными объектами требовались системы, способные не только устранять известное отклонение регулируемой величины от заданной, но и решать более сложные задачи, автоматически отыскивать такие изменения самой системы, чтобы достичь необходимого результата.
Самонастройка в принципе означает способность системы решать задачу регулирования при различных возмущающих воздействиях, часто даже не предвиденных конструктором. Достигается она с помощью устройств, могущих непрерывно следить за характеристиками системы и так воздействовать на ее параметры, чтобы приближать характеристики к оптимальным (наивыгодным, наилучшим).
Рассмотрим для начала наиболее простые из самонастраивающихся систем — системы экстремального управления. В них требуется найти и поддерживать такое значение регулируемой величины, при котором достигается наименьшее или наибольшее из возможных значений (оно и называется экстремальным) определенной характеристики режима. К экстремальному значению можно отнести минимум расхода энергии, топлива, максимум коэффициента полезного действия и т. д.
Для того чтобы лучше представить себе принцип работы самонастраивающейся системы, сошлемся на пример регулирования подачи топлива в двигатели летательного аппарата. Управляющей системе поставлена цель: обеспечить наиболее экономичный полет. Как известно, это может быть достигнуто на каждой высоте за счет установления оптимального режима: определенной скорости, числа оборотов двигателя, удельного расхода горючего. С изменением высоты эти характеристики меняются. Самонастраивающаяся система, используя данные от контрольных приборов, должна автоматически определить оптимальные значения регулируемых параметров, которые бы обеспечили наиболее экономичный полет.
Более сложна задача поддержания наивыгоднейшего режима в тех случаях, когда некоторые или даже все условия работы установки не контролируются и наперед неизвестны не только степени, но и направления влияния этих условий на эффективность режима. В этом случае используются системы автоматического поиска.
Осуществляя поиск, управляющее устройство самонастраивающейся системы анализирует результаты проб, попыток изменить структуру системы и ее отдельных параметров. Для этого в состав систем вводятся вычислительные устройства, способные «запоминать» данные, выполнять логические операции. Получается так, что система получает возможность принимать «логические» решения, приспосабливаться к изменяющейся внешней обстановке.
Система автоматического поиска имеет своих предшественников в природе. Можно в связи с этим указать на процесс развития вида, так называемый механизм естественного отбора. В качестве «проб» здесь выступают различные формы живых организмов, образующиеся в природе, из которых выживают наиболее приспособленные. По наследству потомству передаются те черты, которые обеспечивают большую жизнеспособность. Варьируя миллиарды организмов, природа образовала высокоразвитые виды живых существ.
Аналогично осуществляется поиск в автоматическом устройстве, которое, пробуя различные варианты, изменяет характеристики и даже структуру управляющего устройства, с тем чтобы система, которую хотят усовершенствовать, приобрела наивыгоднейшие свойства.
Каковы же принципы поиска экстремальных значений в самонастраивающихся системах? Их можно искать с помощью различных перемещений регулирующего органа. Существует, например, метод использования небольших перемещений (колебаний) регулирующего органа в одну и другую сторону около среднего его положения. Применяя специальные устройства, удается проанализировать результаты и определить направление движения регулирующего органа.
На рис. 10 показана зависимость параметра системы ψ (например, коэффициента полезного действия) от перемещения регулирующего органа X.
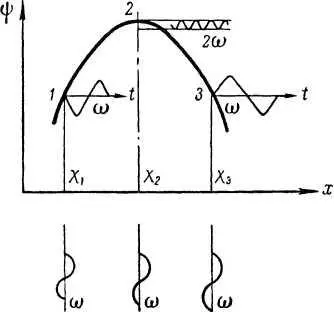
Рис. 10. Автоматический поиск с помощью колебаний синусоидальной формы с частотой ω. Воздействие таких колебаний приводит к выходным колебаниям показателя ψ, изображенным и точках 1, 2, 3.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Что такое бионика»
Представляем Вашему вниманию похожие книги на «Что такое бионика» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.


Обсуждение, отзывы о книге «Что такое бионика» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.