John Long - Darwin’s Devices
Здесь есть возможность читать онлайн «John Long - Darwin’s Devices» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: Биология, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Darwin’s Devices
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Darwin’s Devices: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Darwin’s Devices»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
In Darwin’s Devices, Long tells the story of these evolving biorobots—how they came to be, and what they can teach us about the biology of living and extinct species. Evolving biorobots can replicate creatures that disappeared from the earth long ago, showing us in real time what happens in the face of unexpected environmental challenges. Biomechanically correct models of backbones functioning as part of an autonomous robot, for example, can help us understand why the first vertebrates evolved them.
But the most impressive feature of these robots, as Long shows, is their ability to illustrate the power of evolution to solve difficult technological challenges autonomously—without human input regarding what a workable solution might be. Even a simple robot can create complex behavior, often learning or evolving greater intelligence than humans could possibly program. This remarkable idea could forever alter the face of engineering, design, and even warfare.
An amazing tour through the workings of a fertile mind, Darwin’s Devices will make you rethink everything you thought you knew about evolution, robot intelligence, and life itself.
Darwin’s Devices — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Darwin’s Devices», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Designing evolving robots of any kind has a number of important steps. The first and the most important is not something in the engineers’ code, although I think perhaps it ought to be: naming.
I feel it’s my responsibility to point out that if you neglect this first design stage, if you think it’s too silly to spend time on naming your robot, then you’ll regret it. You’ll find that other people will automatically and impulsively toss out names as they encounter and work with even just the idea of the robot. And one of those names—invariably the one that repulses you the most—will stick.
If you follow the examples of roboticists before you, you’ll take one of three approaches to naming. Approach one, eponymism: name your robot after a famous person, preferably someone in robotics or artificial intelligence who is still living and can pay back the favor some day. Honda Motor Corporation took this approach when they named their bipedal spaceman-type robot “Asimo” after the great but late science fiction genius Isaac Asimov, inventor, among other things, of the Three Laws of Robotics.
Approach two, bionymism: name your robot after the animal that inspired it or the job that it does. Michael Triantafyllou at the Massachusetts Institute of Technology created the famous fish-inspired RoboTuna back in the 1980s. Bionymism, when applied to robots, often involves the creation of a portmanteau, the smushing of two words to make a new one. When smushing for your bionymistic robotic purposes, consider the common prefixes “ro-” and “cy-” along with the suffixes “-bot,” “-tron,” “-borg,” and “-droid.”
Approach three, acronymism: name your robot using an acronym that is a random letter string or, heaven forbid, an actual word related to your robot. The military loves nonword letter strings, like VCUUC, which stands for Vorticity Control Unmanned Undersea Vehicle. VCUUC, spoken as “vee-cuhk,” is the serious, naval stage name of RoboTuna. VCUUC is a kind of AUV, spoken as “eh-you-vee,” which stands for Autonomous Underwater Vehicle.
Now we are ready to tackle our “evolving robots.” We call them Evolvabots. We really went out on a limb and smushed, using the functional variant of the bionymistic approach.
Our Evolvabots need to be autonomous agents operating in an evolutionary world, but that’s not all we need them to be—we need them to address our specific hypothesis, such as the relationship between swimming ability and the evolution of the backbone. In order to create those specific Evolvabots and their world, we need to ask and answer a host of mission-critical questions:
* Which animal will we model and why?
* Which features of the animal will the Evolvabots possess and why?
* Which features of the animal’s world will we model and why?
* What is the selection pressure that we apply and why was it chosen?
* How does the Evolvabot and its world, taken together, represent the animal and its world?
* How will we judge if our Evolvabots are a good model of the targeted animal?
These questions are critical because their answers drive years of effort from a group of people, the research team. If you haven’t answered these questions carefully and used them to guide your design effort, then later, when you are done running your experiments and want to get your project published in a scientific journal, you may find your team saddled with a paper that is DOA.
These mission-critical questions hark back to the “why robots?” question of Chapter 1. You have to be able to show that your Evolvabots and the processes that are used to evolve them represent, in some way, biological reality. The important word here is “represent.” To represent is not the same as saying that you have to replicate exactly the actual vertebrate and its actual environment (i.e., you don’t have to make a cat to model a cat). Instead, you have to demonstrate that the decisions you made in designing your Evolvabots were not arbitrary. Time, equipment, money, and expertise will always constrain those decisions. But the knowledge of your target system must also guide those decisions: you have to show that features of your Evolvabot relate to—represent—features of your target.
Representation is a general process that occurs in many different ways. For example, in biology representation occurs between the information to build the animal and the physical manifestation of the animal itself: the genome of an animal represents its phenotype (Figure 3.1). In modeling with Evolvabots, representation occurs between the robot and its biological target: the robot is a representation of the target.
How does one thing represent another thing? This is a fundamental issue in cognitive science, artificial intelligence, and philosophy of the mind. [12] For an in-depth examination of representation, see Tim Crane’s Mechanical Mind: A Philosophical Introduction to Minds, Machines, and Mental Representation , 2nd ed. (London, New York: Routledge, 2003).
The most straightforward case that I can think of is when one thing is an instance of a category of things. A Tadro is an instance of an Evolvabot. As an instance, a specific Tadro represents the general category of Evolvabots. You can also flip this on its head: the category of Evolvabots represents, by definition, all instances of any kind of Evolvabot, including all the Tadros.
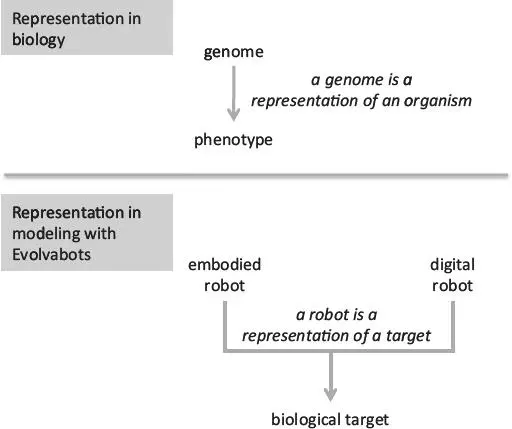
FIGURE 3.1. Representation in biology and in modeling with Evolvabots. In biology each animal is represented by its genome, the genetic instructions that interact over time with the environment to make the phenotype, the physical manifestation of the animal. In modeling with Evolvabots, an embodied or digital robot may represent a target, such as a vertebrate. In biology the representation is essential for development and replication of the animal. In modeling, the robotic representation is also an attempt to replicate something—in this case, particular aspects of the biological target.
We encounter this kind of categorical representation all the time when we learn. Someone shows us an example of something new to us. Hey, look at this thing called a chocolate donut! Look at it. Smell it. Feel it. Taste it. This particular donut, the donut master tells you, is one example of a whole category of foodstuffs called donuts. The category, “donuts,” includes other chocolate donuts that look and taste very much like this one, chocolate donuts that don’t look like this one (they have sprinkles) but taste similar, and donuts that neither look like this one nor taste like it either. As you can see and taste, the representation of all donuts by a chocolate donut is created in the human mind by linking the instance at hand (or is it at mouth?) with other imagined instances. The “linking” here refers to features of the donut—looks, smell, feel, and taste—that we can morph in our minds in order to create a new imaginary instance of a donut.
So if our minds do the linking between one thing and another, and this linking is the process by which we create representations, then our mind is doing the representing. Other minds, other engines of representation, are thus the judges of our efforts at representing. If no one else thinks that we’ve done a good job building an Evolvabot to represent a vertebrate, then we haven’t. More on judgment later.
To build scientifically useful Evolvabots, we need to use our minds and the minds of others to figure out, explicitly and objectively, how the Evolvabot represents an animal. Bloody obvious, eh? Maybe so. But keep in mind that we (meaning me and other nerds) often get so excited when we start to do cool stuff like build robots that we just start putting parts together, whatever’s at hand, in order to quickly build something that works. Although this can be an exciting way to start designing robots, the implicit intuitions that guide this kind of spontaneous creation can often miss the mark in terms of clearly representing the thing that we meant to represent. So before you get started: stop! Answer the six design questions! [13] In other words, make a plan. Once you have an explicit plan researched and written down—the answers to the six design questions are a good start—then keep in mind what General Dwight Eisenhower said: “In preparing for battle I’ve always found that plans are useless, but planning is indispensible.”
Интервал:
Закладка:
Похожие книги на «Darwin’s Devices»
Представляем Вашему вниманию похожие книги на «Darwin’s Devices» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.

Обсуждение, отзывы о книге «Darwin’s Devices» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.