Владимир Дьяконов - Maple 9.5/10 в математике, физике и образовании
Здесь есть возможность читать онлайн «Владимир Дьяконов - Maple 9.5/10 в математике, физике и образовании» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Москва, Год выпуска: 2006, ISBN: 2006, Издательство: СОЛОН-Пресс, Жанр: Программы, Математика, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Maple 9.5/10 в математике, физике и образовании
- Автор:
- Издательство:СОЛОН-Пресс
- Жанр:
- Год:2006
- Город:Москва
- ISBN:5-98003-258-4
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Maple 9.5/10 в математике, физике и образовании: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Maple 9.5/10 в математике, физике и образовании»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Maple 9.5/10 в математике, физике и образовании — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Maple 9.5/10 в математике, физике и образовании», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
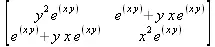
Примеры задания таких матриц приведены ниже (файл vecmatrix):
> Hessian(ехр(х*y), [х,y]);
> Hessian(а/(х^2+y^2+z^2), [х, y, z]);
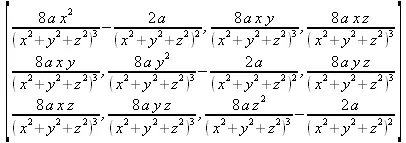
> Н := unapply(%, [a,x,y,z]):
> Н(1/2, 0.3, 0.7, 0.1);

> Jacobian([r*cos(t), r*sin(t)], [r,t]);
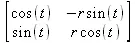
> Jacobian([r*cos(t), r*sin(t)], [r,t], 'determinant');

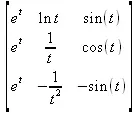
> Wronskian([exp(t),ln(t),sin(t)], t);
> Wronskian([t, t^2, t^3], t)

4.11.7. Функции теории поля
К основным функциям теории поля относятся:
Curl(F) — вычисляет вихрь векторного поля в R³;
Divergence(F) — вычисляет дивергенцию векторного поля;
Flux(f, dom) — вычисляет поток векторного поля в R³;
Gradient(f, с) — вычисляет градиент функции f в пространстве от R nдо R;
Del(f, с) и Nabla(f, с) — векторные дифференциальные операторы;
Laplacian(f, с) или Laplacian(F) — вычисляет лапласиан функции f или векторного определения (процедуры) F;
ScalarPotential(v) — вычисляет скалярный потенциал векторного поля;
Torsion(C, t) — вычисляет торсион в R³;
VectorPotential(v) — вычисляет векторный потенциал в R³;
Довольно громоздкие определения этих функций, основанные на использовании криволинейных и поверхностных интегралов, имеются в учебной литературе. Не приводя их, ограничимся приведенными ниже примерами применение указанных выше функций (файл vecft):
> restart:with(VectorCalculus): SetCoordinates('cartesian'[x,y,z]);
> F := VectorField( <-y,x,0> );
> Curl(F);
> Del &x F;
> Nabla &x F;
> CrossProduct(Del, F);
> F := VectorField(<���х^2,y^2,z^2>);
> Divergence(F);
> Flux(VectorField(, cartesian[x,y,z]), Sphere(<0,0,0>, r));
> Gradient(х^3/3+у^2, [x,y]);
> Del(х^2+у^2+z^2);
> Nabla(х^2+у^2+z^2);
> Del . %;
> Laplacian(х^2+у^2+z^2, [x,y,z]);
> Laplacian(f(r,theta,z));

> SetCoordinates('cylindrical' [r, theta, z])
> Laplacian(f(r, theta, z));

> SetCoordinates('cartesian'[x,y,z]);
> v := VectorField();
> ScalarPotential(v);

> v := VectorField(<-y,0,z>);
> ScalarPotential(v); den := х^2 + y^2 + z^2;
> ScalarPotential((x,y,z) -> /den);
> SetCoordinates('spherical'[r,phi,theta]);
> v := VectorField();
> ScalarPotential(v);

> restart:with(VectorCalculus): simplify( Torsion()) assuming t::real;

> Torsion(t -> <2*t,sin(t),cos(t)>);

> SetCoordinates('cartesian'[x,y,z]); v := VectorField();
> VectorPotential(v);
> SetCoordinates('cylindrical'[r,theta,z]);
> v := VectorField();
> VectorPotential(v);
> simplify(Curl(%));
Обратите внимание на то, что для гарантии правильного выполнения этих команд и отсутствия «зависания» компьютера может потребоваться команда restart и перезагрузка пакета VectorCalculus.
4.11.8. Приближение площади сложной поверхности суммами Римана
Одним из важнейших приложений пакета VectorCalculus является вычисление длин дуг и площадей сложных поверхностей на основе применения линейных и поверхностных интегралов. Иногда это встречает большие трудности и требует специальных подходов. Примером может служить поверхность, заданная рис. 4.40. Эта поверхность построена с имитацией ее освещения от внешнего источника света.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Maple 9.5/10 в математике, физике и образовании»
Представляем Вашему вниманию похожие книги на «Maple 9.5/10 в математике, физике и образовании» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.




Обсуждение, отзывы о книге «Maple 9.5/10 в математике, физике и образовании» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.