Qing Li - Real-Time Concepts for Embedded Systems
Здесь есть возможность читать онлайн «Qing Li - Real-Time Concepts for Embedded Systems» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: San Francisco, Год выпуска: 2003, ISBN: 2003, Издательство: CMP books, Жанр: ОС и Сети, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Real-Time Concepts for Embedded Systems
- Автор:
- Издательство:CMP books
- Жанр:
- Год:2003
- Город:San Francisco
- ISBN:1-57820-124-1
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Real-Time Concepts for Embedded Systems: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Real-Time Concepts for Embedded Systems»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Delve into the details of real-time programming so you can develop a working knowledge of the common design patterns and program structures of real-time operating systems (RTOS). The objects and services that are a part of most RTOS kernels are described and real-time system design is explored in detail. You learn how to decompose an application into units and how to combine these units with other objects and services to create standard building blocks. A rich set of ready-to-use, embedded design “building blocks” is also supplied to accelerate your development efforts and increase your productivity.
Experienced developers new to embedded systems and engineering or computer science students will both appreciate the careful balance between theory, illustrations, and practical discussions. Hard-won insights and experiences shed new light on application development, common design problems, and solutions in the embedded space. Technical managers active in software design reviews of real-time embedded systems will find this a valuable reference to the design and implementation phases.
Qing Li is a senior architect at Wind River Systems, Inc., and the lead architect of the company’s embedded IPv6 products. Qing holds four patents pending in the embedded kernel and networking protocol design areas. His 12+ years in engineering include expertise as a principal engineer designing and developing protocol stacks and embedded applications for the telecommunications and networks arena. Qing was one of a four-member Silicon Valley startup that designed and developed proprietary algorithms and applications for embedded biometric devices in the security industry.
Caroline Yao has more than 15 years of high tech experience ranging from development, project and product management, product marketing, business development, and strategic alliances. She is co-inventor of a pending patent and recently served as the director of partner solutions for Wind River Systems, Inc. About the Authors
Real-Time Concepts for Embedded Systems — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Real-Time Concepts for Embedded Systems», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Before designing a real-time application, take time to understand and itemize each of the timing deadlines required for the application. After the timing deadlines have been identified, separate tasks can be assigned to handle the separate deadlines. Task priorities can be assigned based on the criticality or urgency of each deadline.
Note the difference between criticality and urgency. Critical tasks are tasks whose failure would be disastrous. The deadline might be long or short but must always be met, or else the system does not fulfill the specifications. An urgent task is a task whose timing deadline is relatively short. Meeting this deadline might or might not be critical. Both urgent and critical tasks are usually set to higher relative priorities.
Each rate-driven activity runs independently of any other rate. Periodic activities can be identified, and activities can be grouped into tasks with similar rates.
Real-time systems may contain sequences of code that always execute at the same time, although they are functionally unrelated. Such sequences exhibit temporal cohesion. Examples are different activities driven by the same external stimulus (i.e., a timer). Grouping such sequences into one task reduces system overhead.
Some activities in a real-time application require a lot of CPU time compared to the time required for other operations, such as performing I/O. These activities, known as computationally bound activities , can be number-crunching activities and typically have relatively long deadlines. These types of activities are usually set to lower relative priorities so that they do not monopolize the CPU. In some cases, these types of tasks can be time-sliced at a common priority level, where each gets time to execute when tasks that are more critical don't need to run.
Functional cohesion requires collecting groups of functions or sequences of code that perform closely related activities into a single task. In addition, if two tasks are closely coupled (pass lots of data between each other), they should also be considered for combination into one task. Grouping these closely related or closely coupled activities into a singe task can help eliminate synchronization and communication overhead.
Tasks can also be grouped according to the specific purposes they serve. One example of a task serving a clear purpose is a safety task. Detection of possible problems, setting alarms, and sending notifications to the user, as well as setting up and executing corrective measures, are just some examples that can be coordinated in a safety task or group of tasks. Other tasks can also exist in a real-time system that can serve a specific purpose.
Sequential cohesion groups activities that must occur in a given sequence into one task to further emphasize the requirement for sequential operation. A typical example is a sequence of computations that must be carried out in a predefined order. For example, the result of the first computation provides input to the next computation and so on.
14.4 Schedulability Analysis-Rate Monotonic Analysis
After an embedded application has been decomposed into ISRs and tasks, the tasks must be scheduled to run in order to perform required system functionality. Schedulability analysis determines if all tasks can be scheduled to run and meet their deadlines based on the deployed scheduling algorithm while still achieving optimal processor utilization.
Note that schedulability analysis looks only at how systems meet temporal requirements, not functional requirements.
The commonly practiced analytical method for real-time systems is Rate Monotonic Analysis (RMA). Liu and Layland initially developed the mathematical model for RMA in 1973. (This book calls their RMA model the basic RMA because it has since been extended by later researchers.) The model is developed over a scheduling mechanism called Rate Monotonic Scheduling (RMS), which is the preemptive scheduling algorithm with rate monotonic priority assignment as the task priority assignment policy. Rate monotonic priority assignment is the method of assigning a task its priority as a monotonic function of the execution rate of that task. In other words, the shorter the period between each execution, the higher the priority assigned to a task.
A set of assumptions is associated with the basic RMA. These assumptions are that:
· all of the tasks are periodic,
· the tasks are independent of each other and that no interactions occur among tasks,
· a task's deadline is the beginning of its next period,
· each task has a constant execution time that does not vary over time,
· all of the tasks have the same level of criticality, and
· aperiodic tasks are limited to initialization and failure recovery work and that these aperiodic tasks do not have hard deadlines.
14.4.1 Basic RMA Schedulability Test
Equation 14.1 is used to perform the basic RMA schedulability test on a system.

C i = worst-case execution time associated with periodic task I
T i = period associated with task i
n = number of tasks
U ( n ) is the utilization factor. The right side of the equation is the theoretical processor utilization bound. If the processor utilization for a given set of tasks is less than the theoretical utilization bound, this set of tasks is schedulable. The value of U decreases as n increases and eventually converges to 69% when n becomes infinite.
Let's look at a sample problem and see how the formula is implemented. Table 14.3 summarizes the properties of three tasks that are scheduled using the RMS.
Table 14.3: Properties of tasks.
| Periodic Task | Execution Time | Period (milliseconds) |
|---|---|---|
| Task 1 | 20 | 100 |
| Task 2 | 30 | 150 |
| Task 3 | 50 | 300 |
Using Equation 14.1, the processor utilization for this sample problem is calculated as follows
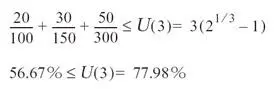
Total utilization for the sample problem is at 57%, which is below the theoretical bound of 77%. This system of three tasks is schedulable, i.e., every task can meet its deadline.
14.4.2 Extended RAM Schedulability Test
The basic RMA is limiting. The second assumption associated with basic RMA is impractical because tasks in real-time systems have inter-dependencies, and task synchronization methods are part of many real-time designs. Task synchronization, however, lies outside the scope of basic RMA.
Deploying inter-task synchronization methods implies some tasks in the system will experience blocking, which is the suspension of task execution because of resource contention. Therefore, the basic RMA is extended to account for task synchronization. Equation 14.2 provides the equation for the extended RMA schedulability test.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Real-Time Concepts for Embedded Systems»
Представляем Вашему вниманию похожие книги на «Real-Time Concepts for Embedded Systems» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.








Обсуждение, отзывы о книге «Real-Time Concepts for Embedded Systems» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.