Qing Li - Real-Time Concepts for Embedded Systems
Здесь есть возможность читать онлайн «Qing Li - Real-Time Concepts for Embedded Systems» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: San Francisco, Год выпуска: 2003, ISBN: 2003, Издательство: CMP books, Жанр: ОС и Сети, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Real-Time Concepts for Embedded Systems
- Автор:
- Издательство:CMP books
- Жанр:
- Год:2003
- Город:San Francisco
- ISBN:1-57820-124-1
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Real-Time Concepts for Embedded Systems: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Real-Time Concepts for Embedded Systems»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Delve into the details of real-time programming so you can develop a working knowledge of the common design patterns and program structures of real-time operating systems (RTOS). The objects and services that are a part of most RTOS kernels are described and real-time system design is explored in detail. You learn how to decompose an application into units and how to combine these units with other objects and services to create standard building blocks. A rich set of ready-to-use, embedded design “building blocks” is also supplied to accelerate your development efforts and increase your productivity.
Experienced developers new to embedded systems and engineering or computer science students will both appreciate the careful balance between theory, illustrations, and practical discussions. Hard-won insights and experiences shed new light on application development, common design problems, and solutions in the embedded space. Technical managers active in software design reviews of real-time embedded systems will find this a valuable reference to the design and implementation phases.
Qing Li is a senior architect at Wind River Systems, Inc., and the lead architect of the company’s embedded IPv6 products. Qing holds four patents pending in the embedded kernel and networking protocol design areas. His 12+ years in engineering include expertise as a principal engineer designing and developing protocol stacks and embedded applications for the telecommunications and networks arena. Qing was one of a four-member Silicon Valley startup that designed and developed proprietary algorithms and applications for embedded biometric devices in the security industry.
Caroline Yao has more than 15 years of high tech experience ranging from development, project and product management, product marketing, business development, and strategic alliances. She is co-inventor of a pending patent and recently served as the director of partner solutions for Wind River Systems, Inc. About the Authors
Real-Time Concepts for Embedded Systems — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Real-Time Concepts for Embedded Systems», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
General exceptions have classifications and are prioritized based on the classifications. It is possible there exists another level of priorities, imposed and enforced by the interrupt hardware, among the external interrupts. Understanding the hardware sources that can trigger general exceptions, the hardware that implements the transfer of control, and the mechanisms for determining where control vectors reside are all critical to properly installing general exception handlers and to writing correct general exception handlers.
10.4.1 Programmable Interrupt Controllers and External Interrupts
Most embedded designs have more than one source of external interrupts, and these multiple external interrupt sources are prioritized. To understand how this process is handled, a clear understanding of the concept of a programmable interrupt controller (PIC) is required.
The PIC is implementation-dependent. It can appear in a variety of forms and is sometimes given different names, however, all serve the same purpose and provide two main functionalities:
· Prioritizing multiple interrupt sources so that at any time the highest priority interrupt is presented to the core CPU for processing.
· Offloading the core CPU with the processing required to determine an interrupt's exact source.
The PIC has a set of interrupt request lines. An external source generates interrupts by asserting a physical signal on the interrupt request line. Each interrupt request line has a priority assigned to it. Figure 10.1 illustrates a PIC used in conjunction with four interrupt sources. Each interrupt source connects to one distinct interrupt request line: the airbag deployment sensor, the break deployment sensor, the fuel-level sensor detecting the amount of gasoline in the system, and a real-time clock.
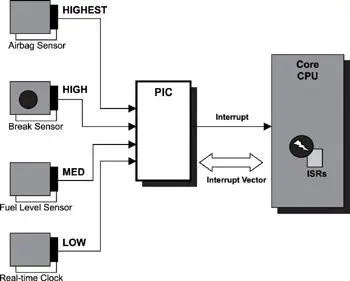
Figure 10.1: Programmable interrupt controller.
Figure 10.1 translates into an interrupt table that captures this information more concisely. The interrupt table lists all available interrupts in the embedded system. In addition, several other properties help define the dynamic characteristics of the interrupt source. Table 10.1 is an example of an interrupt table for the hypothetical example shown in Figure 10.1. The information in the table illustrates all of the sources of external interrupts that the embedded system must handle.
Why is it important to know this information? Understanding the priorities of the interrupt sources enables the embedded systems programmer to better understand the concept of nested interrupts. The term refers to the ability of a higher priority interrupt source to preempt the processing of a lower priority interrupt. It is easy to see how low-priority interrupt sources are affected by higher priority interrupts and their execution times and frequency if this interrupt table is ordered by overall system priority. This information aids the embedded systems programmer in designing and implementing better ISRs that allow for nested interrupts.
The maximum frequency column of the interrupt table specifies the process time constraint placed on all ISRs that have the smallest impact on the overall system.
Table 10.1: Interrupt table.
| Source | Priority | Vector Address | IRQ | Max Freq. | Description |
|---|---|---|---|---|---|
| Airbag Sensor | Highest | 14h | 8 | N/A | Deploys airbag |
| Break Sensor | High | 18h | 7 | N/A | Deploys the breaking system |
| Fuel Level Sensor | Med | 1Bh | 6 | 20Hz | Detects the level of gasoline |
| Real-Time Clock | Low | 1Dh | 5 | 100Hz | Clock runs at 10ms ticks |
The vector address column specifies where in memory the ISR must be installed. The processor automatically fetches the instruction from one of these known addresses based on the interrupt number, which is specified in the IRQ column. This instruction begins the interrupt-specific service routine. In this example, the interrupt table contains a vector address column, but these values are dependent on processor and hardware design. In some designs, a column of indexes is applied to a formula used to calculate an actual vector address. In other designs, the processor uses a more complex formulation to obtain a vector address before fetching the instructions. Consult the hardware manual for specific details. Later sections of this chapter discuss the interrupt service routine in detail. In general, the vector table also covers the service routines for synchronous exceptions. The service routines are also called vectors in short.
10.4.2 Classification of General Exceptions
Although not all embedded processors implement exceptions in the same manner, most of the more recent processors have these types of exceptions:
· asynchronous-non-maskable,
· asynchronous-maskable,
· synchronous-precise, and
· synchronous-imprecise.
Asynchronous exceptions are classified into maskable and non-maskable exceptions. External interrupts are asynchronous exceptions. Asynchronous exceptions that can be blocked or enabled by software are called maskable exceptions. Similarly, asynchronous exceptions that cannot be blocked by software are called non-maskable exceptions. Non-maskable exceptions are always acknowledged by the processor and processed immediately. Hardware-reset exceptions are always non-maskable exceptions. Many embedded processors have a dedicated non-maskable interrupt (NMI) request line. Any device connected to the NMI request line is allowed to generate an NMI.
External interrupts, with the exception of NMIs, are the only asynchronous exceptions that can be disabled by software.
Synchronous exceptions can be classified into precise and imprecise exceptions. With precise exception s, the processor's program counter points to the exact instruction that caused the exception, which is the offending instruction , and the processor knows where to resume execution upon return from the exception. With modern architectures that incorporate instruction and data pipelining, exceptions are raised to the processor in the order of written instruction, not in the order of execution. In particular, the architecture ensures that the instructions that follow the offending instruction and that were started in the instruction pipeline during the exception do not affect the CPU state. This chapter is concerned with precise exceptions.
Silicon vendors employ a number of advanced techniques (such as predictive instruction and data loading, instruction and data pipelining, and caching mechanisms) to streamline overall execution in order to increase chip performance. For example, the processor can do floating point and integer memory operations out of order with the non-sequential memory access mode. If an embedded processor implements heavy pipelining or pre-fetch algorithms, it can often be impossible to determine the exact instruction and associated data that caused an exception. This issue indicates an imprecise exception . Consequently, when some exceptions do occur, the reported program counter does not point to the offending instruction, which makes the program counter meaningless to the exception handler.
Why is it important to know this information? Knowing the type of exception for which an exception handler is written helps the programmer determine how the system is to recover from the exception, if the exception is at all recoverable.
10.4.3 General Exception Priorities
Интервал:
Закладка:
Похожие книги на «Real-Time Concepts for Embedded Systems»
Представляем Вашему вниманию похожие книги на «Real-Time Concepts for Embedded Systems» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.








Обсуждение, отзывы о книге «Real-Time Concepts for Embedded Systems» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.