Qing Li - Real-Time Concepts for Embedded Systems
Здесь есть возможность читать онлайн «Qing Li - Real-Time Concepts for Embedded Systems» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: San Francisco, Год выпуска: 2003, ISBN: 2003, Издательство: CMP books, Жанр: ОС и Сети, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Real-Time Concepts for Embedded Systems
- Автор:
- Издательство:CMP books
- Жанр:
- Год:2003
- Город:San Francisco
- ISBN:1-57820-124-1
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Real-Time Concepts for Embedded Systems: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Real-Time Concepts for Embedded Systems»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Delve into the details of real-time programming so you can develop a working knowledge of the common design patterns and program structures of real-time operating systems (RTOS). The objects and services that are a part of most RTOS kernels are described and real-time system design is explored in detail. You learn how to decompose an application into units and how to combine these units with other objects and services to create standard building blocks. A rich set of ready-to-use, embedded design “building blocks” is also supplied to accelerate your development efforts and increase your productivity.
Experienced developers new to embedded systems and engineering or computer science students will both appreciate the careful balance between theory, illustrations, and practical discussions. Hard-won insights and experiences shed new light on application development, common design problems, and solutions in the embedded space. Technical managers active in software design reviews of real-time embedded systems will find this a valuable reference to the design and implementation phases.
Qing Li is a senior architect at Wind River Systems, Inc., and the lead architect of the company’s embedded IPv6 products. Qing holds four patents pending in the embedded kernel and networking protocol design areas. His 12+ years in engineering include expertise as a principal engineer designing and developing protocol stacks and embedded applications for the telecommunications and networks arena. Qing was one of a four-member Silicon Valley startup that designed and developed proprietary algorithms and applications for embedded biometric devices in the security industry.
Caroline Yao has more than 15 years of high tech experience ranging from development, project and product management, product marketing, business development, and strategic alliances. She is co-inventor of a pending patent and recently served as the director of partner solutions for Wind River Systems, Inc. About the Authors
Real-Time Concepts for Embedded Systems — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Real-Time Concepts for Embedded Systems», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
· Events of the same type are not accumulated in the event register.
· The occurrence of an event in the event register does not change the execution state of the receiving task, unless the task is already waiting on that event.
· Tasks receive signals synchronously.
· The occurrence of a signal changes the execution state of the receiving task.
· Signals can be handled by user-defined actions or by system-defined default actions.
· Multiple occurrences of the same signal are not cumulative.
· A condition variable allows one task to wait until another task has placed a shared resource in a desired state or condition.
· A condition variable is used to synchronize between tasks but is not used as a mechanism to synchronize access to shared resources.
Chapter 9: Other RTOS Services
9.1 Introduction
A good real-time embedded operating system avoids implementing the kernel as a large, monolithic program. The kernel is developed instead as a micro-kernel. The goal of the micro-kernel design approach is to reduce essential kernel services into a small set and to provide a framework in which other optional kernel services can be implemented as independent modules. These modules can be placed outside the kernel. Some of these modules are part of special server tasks. This structured approach makes it possible to extend the kernel by adding additional services or to modify existing services without affecting users. This level of implementation flexibility is highly desirable. The resulting benefit is increased system configurability because each embedded application requires a specific set of system services with respect to its characteristics. This combination can be quite different from application to application.
The micro-kernel provides core services, including task-related services, the scheduler service, and synchronization primitives. This chapter discusses other common building blocks, as shown in Figure 9.1.
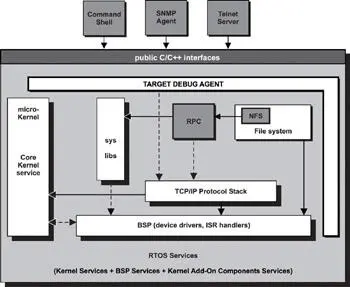
Figure 9.1: Overview.
9.2 Other Building Blocks
These other common building blocks make up the additional kernel services that are part of various embedded applications. The other building blocks include the following:
· TCP/IP protocol stack,
· file system component,
· remote procedure call component,
· command shell,
· target debut agent, and
· other components.
9.2.1 TCP/IP Protocol Stack
The network protocol stacks and components, as illustrated in Figure 9.2, provide useful system services to an embedded application in a networked environment. The TCP/IP protocol stack provides transport services to both higher layer, well-known protocols, including Simple Network Management Protocol (SNMP), Network File System (NFS), and Telnet, and to user-defined protocols. The transport service can be either reliable connection-oriented service over the TCP protocol or unreliable connectionless service over the UDP protocol. The TCP/IP protocol stack can operate over various types of physical connections and networks, including Ethernet, Frame Relay, ATM, and ISDN networks using different frame encapsulation protocols, including the point-to-point protocol. It is common to find the transport services offered through standard Berkeley socket interfaces.
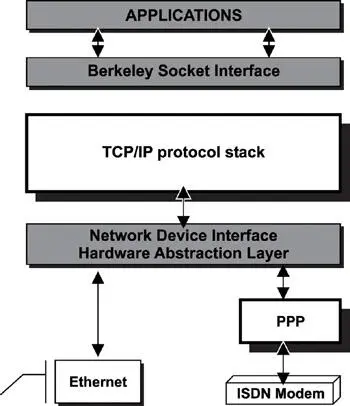
Figure 9.2: TCP/IP protocol stack component.
9.2.2 File System Component
The file system component, as illustrated in Figure 9.3, provides efficient access to both local and network mass storage devices. These storage devices include but are not limited to CD-ROM, tape, floppy disk, hard disk, and flash memory devices. The file system component structures the storage device into supported formats for writing information to and for accessing information from the storage device. For example, CD-ROMs are formatted and managed according to ISO 9660 standard file system specifications; floppy disks and hard disks are formatted and managed according to MS-DOS FAT file system conventions and specifications; NFS allows local applications to access files on remote systems as an NFS client. Files located on an NFS server are treated exactly as though they were on a local disk. Because NFS is a protocol, not a file system format, local applications can access any format files supported by the NFS server. File system components found in some real-time RTOS provide high-speed proprietary file systems in place of common storage devices.
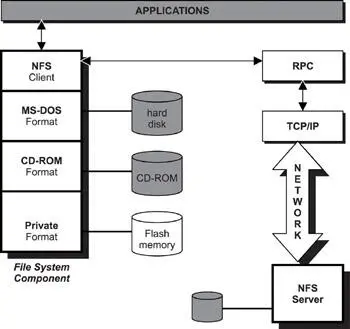
Figure 9.3: File system component.
9.2.3 Remote Procedure Call Component
The remote procedure call (RPC) component allows for distributed computing. The RPC server offers services to external systems as remotely callable procedures. A remote RPC client can invoke these procedures over the network using the RPC protocol. To use a service provided by an RPC server, a client application calls routines, known as stubs, provided by the RPC client residing on the local machine.
The RPC client in turn invokes remote procedure calls residing in the RPC server on behalf of the calling application. The primary goal of RPC is to make remote procedure calls transparent to applications invoking the local call stubs. To the client application, calling a stub appears no different from calling a local procedure. The RPC client and server can run on top of different operating systems, as well as different types of hardware. As an example of such transparency, note that NFS relies directly upon RPC calls to support the illusion that all files are local to the client machine.
To hide both the server remoteness, as well as platform differences from the client application, data that flows between the two computing systems in the RPC call must be translated to and from a common format. External data representation (XDR) is a method that represents data in an OS- and machine-independent manner. The RPC client translates data passed in as procedure parameters into XDR format before making the remote procedure call. The RPC server translates the XDR data into machine-specific data format upon receipt of the procedure call request. The decoded data is then passed to the actual procedure to be invoked on the server machine. This procedure's output data is formatted into XDR when returning it to the RPC client. The RPC concept is illustrated in Figure 9.4.
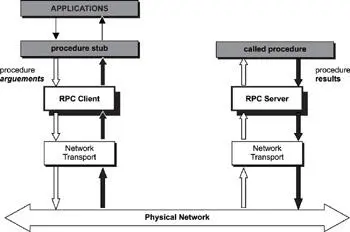
Figure 9.4: Remote procedure calls.
9.2.4 Command Shell
The command shell, also called the command interpreter, is an interactive component that provides an interface between the user and the real-time operating system. The user can invoke commands, such as ping, ls, loader, and route through the shell. The shell interprets these commands and makes corresponding calls into RTOS routines. These routines can be in the form of loadable program images, dynamically created programs (dynamic tasks), or direct system function calls if supported by the RTOS. The programmer can experiment with different global system calls if the command shell supports this feature. With this feature, the shell can become a great learning tool for the RTOS in which it executes, as illustrated in Figure 9.5.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Real-Time Concepts for Embedded Systems»
Представляем Вашему вниманию похожие книги на «Real-Time Concepts for Embedded Systems» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.








Обсуждение, отзывы о книге «Real-Time Concepts for Embedded Systems» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.