Неизвестно - Prolog
Здесь есть возможность читать онлайн «Неизвестно - Prolog» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: Старинная литература, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Prolog
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:3 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Prolog: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Prolog»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Prolog — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Prolog», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
И / ИЛИ-графе ( h = 0) при решении задачи рис. 13.4.
прекращается. В результате процесс поиска не успевает "осознать", что h - это тоже целевая вершина и что порождено решающее дерево. Вместо этого происходит переключение активности на конкурирующую альтернативу с . Поскольку в этот момент F( b) = 9, устанавливается верхняя граница для F( c) , равная 9. Дерево-кандидат с корнем с наращивается (с учетом установленного ограничения) до тех пор, пока не возникает ситуация, показанная на снимке Е. Теперь процесс поиска обнаруживает, что найдено решающее дерево (включающее в себя целевые вершины h и g ), на чем поиск заканчивается. Заметьте, что в качестве результата процесс поиска выдает наиболее дешевое из двух возможных решающих деревьев, а именно решающее дерево рис. 13.4(с).
13. 4. 2. Программа поиска
Программа, в которой реализованы идеи предыдущего раздела, показана на рис. 13.12. Прежде, чем мы перейдем к объяснению отдельных деталей этой программы, давайте рассмотрим тот способ представления дерева поиска, который в ней используется.
Существует несколько случаев, как показано на рис. 13.11. Различные формы представления поискового дерева возникают как комбинации следующих возможных вариантов, относящихся к размеру дерева и к его "решающему статусу".
Размер:
(1) дерево состоит из одной вершины (листа)
или
(2) оно имеет корень и (непустые) поддеревья.
Решающий статус:
(1) обнаружено, что дерево соответствует
решению задачи( т. е. является решающим
деревом) или
(2) оно все еще решающее дерево- кандидат .
Основной функтор, используемый для представления дерева, указывает, какая из комбинаций этих воз-
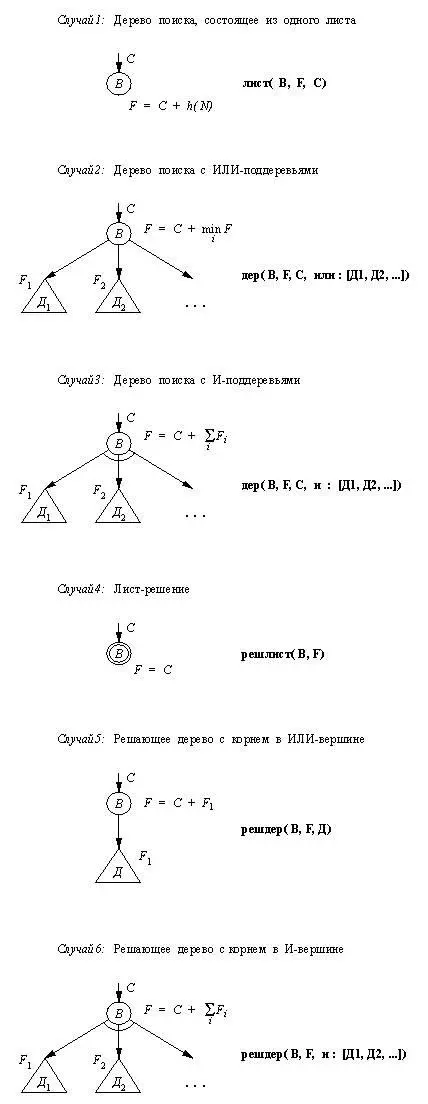
Рис. 13. 11. Представление дерева поиска.
можностей имеется в виду. Это может быть одна из следующих комбинаций:
лист решлист дер решдер
Далее, в представление дерева входят все или некоторые из следующих объектов:
корневая вершина дерева,
F -оценка дерева,
стоимость С дуги И / ИЛИ-графа, ведущей в корень дерева,
список поддеревьев,
отношение (И или ИЛИ) между поддеревьями.
Список поддеревьев всегда упорядочен по возрастанию F -оценок. Поддеревья, являющиеся решающими деревьями, помещаются в конец списка.
Обратимся теперь к программе рис. 13.12. Отношение самого высокого уровня - это
и_или( Верш, РешДер)
где Верш- стартовая вершина. Программа строит решающее дерево (если таковое существует), рассчитывая на то, что оно окажется оптимальным решением. Будет ли это решение в действительности самым дешевым, зависит от той функции h , которую использует алгоритм. Существует теорема, в которой говорится о том, как оптимальность решения зависит от h . Эта теорема аналогична теореме о допустимости алгоритма поиска с предпочтением в пространстве состояний (гл. 12). Обозначим через С( В) стоимость оптимального решающего дерева для вершины В . Если для каждой вершины В И / ИЛИ-графа эвристическая оценка h( B) <= C( B) , то гарантируется, что процедура и_или найдет оптимальное решение. Если же h не удовлетворяет этому условию, то найденное решение может оказаться субоптимальным. Существует тривиальная эвристическая функция, удовлетворяющая условию оптимальности, а именно h = 0 для всех вершин. Ее недостатком является отсутствие эвристической силы.
Основную роль в программе рис. 13.12 играет отношение
расширить( Дер, Предел, Дер1, ЕстьРеш)
Дери Предел- его "входные" аргументы, а Дер1и ЕстьРеш- "выходные". Аргументы имеют следующий смысл:
Дер- дерево поиска, подлежащее расширению.
Предел- предельное значени F -оценки, при котором еще разрешено наращивать дерево Дер.
ЕстьРеш- индикатор, значения которого указывают на то, какой из следующих трех случаев имеет место:
(1) ЕстьРеш = да: Дерможно "нарастить" (с учетом ограничения Предел) таким образом, чтобы образовалось решающее дерево Дер1.
(2) ЕстьРеш = нет: дерево Дерможно расширить до состояния Дер1, для которого F -оценка превосходит Предел, но прежде чем F -оценка превзошла Предел, решающее дерево не было обнаружено.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Prolog»
Представляем Вашему вниманию похожие книги на «Prolog» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.

Обсуждение, отзывы о книге «Prolog» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.