Неизвестно - Prolog
Здесь есть возможность читать онлайн «Неизвестно - Prolog» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: Старинная литература, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Prolog
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:3 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Prolog: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Prolog»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Prolog — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Prolog», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
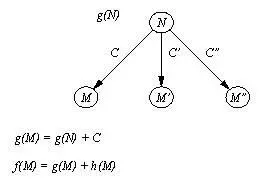
Рис. 12. 5. Связь между g- оценкой вершины В и f- и g- оценками
ее "детей" в пространстве состояний.
Алгоритм поиска пути называют допустимым , если он всегда отыскивает оптимальное решение (т.е. путь минимальной стоимости) при условии, что такой путь существует. Наша реализация алгоритма поиска, пользуясь механизмом возвратов, выдает все существующие решения, поэтому, в нашем случае, условием допустимости следует считать оптимальность первого из найденных решений. Обозначим через h*(n) стоимость оптимального пути из произвольной вершины n в целевую вершину. Верна следующая теорема о допустимости А*-алгоритма: А*-алгоритм, использующий эвристическую функцию h , является допустимым, если
h( n) <= h*( n)
для всех вершин n пространства состояний.
Этот результат имеет огромное практическое значение. Даже если нам не известно точное значение h* , нам достаточно найти какую-либо нижнюю грань h* и использовать ее в качестве h в А*-алгоритме - оптимальность решения будет гарантирована.
Существует тривиальная нижняя грань, а именно:
h( n) = 0, для всех вершин n пространства состояний.
И при таком значении h допустимость гарантирована. Однако такая оценка не имеет никакой эвристической силы и ничем не помогает поиску. А*-алгоритм при h= 0 ведет себя аналогично поиску в ширину. Он, действительно, превращается в поиск в ширину, если, кроме того, положить с(n, n' )= 1 для всех дуг (n, n') пространства состояний. Отсутствие эвристической силы оценки приводит к большой комбинаторной сложности алгоритма. Поэтому хотелось бы иметь такую оценку h , которая была бы нижней гранью h* (чтобы обеспечить допустимость) и, кроме того, была бы как можно ближе к h* (чтобы обеспечить эффективность). В идеальном случае, если бы нам была известна сама точная оценка h* , мы бы ее и использовали: А*-алгоритм, пользующийся h* , находит оптимальное решение сразу, без единого возврата.
Упражнение
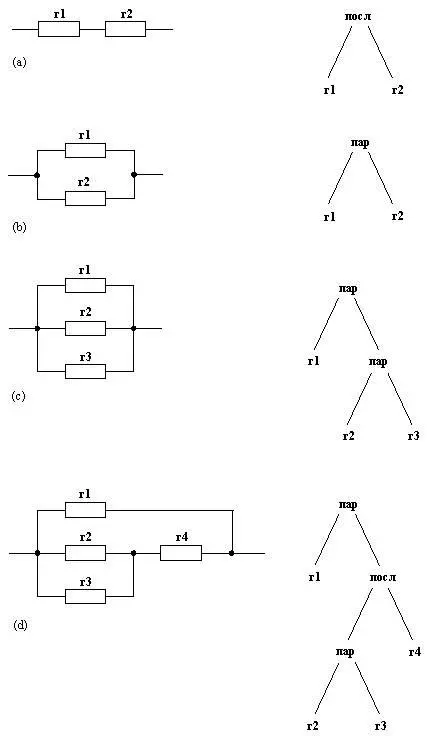
12. 1. Определите отношения после, цельи h для задачи поиска маршрута рис. 12.2. Посмотрите, как наш алгоритм поиска с предпочтением будет вести себя при решении этой задачи.
Назад | Содержание | Вперёд
Назад | Содержание | Вперёд
12. 2. Поиск c предпочтением применительно к головоломке "игра в восемь"
Если мы хотим применить программу поиска с предпочтением, показанную на рис. 12.3, к какой-нибудь задаче, мы должны добавить к нашей программе отношения, отражающие специфику этой конкретной задачи. Эти отношения определяют саму задачу ("правила игры"), а также вносят в алгоритм эвристическую информацию о методе ее решения. Эвристическая информация задается в форме эвристической функции.
/* Процедуры, отражающие специфику головоломки
"игра в восемь".
Текущая ситуация представлена списком положений фишек;
первый элемент списка соответствует пустой клетке.
Пример:
3
2
1
1 2 3
8 4
7 6 5
1 2 3
Эта позиция представляется так:
[2/2, 1/3, 2/3, 3/3, 3/2, 3/1, 2/1, 1/1, 1/2]
"Пусто" можно перемещать в любую соседнюю клетку,
т.е. "Пусто" меняется местами со своим соседом.
*/
после( [Пусто | Спис], [Фшк | Спис1], 1) :-
% Стоимости всех дуг равны 1
перест( Пусто, Фшк, Спис, Спис1).
% Переставив Пусто и Фшк, получаем СПИС1
перест( П, Ф, [Ф | С], [П | С] ) :-
расст( П, Ф, 1).
перест( П, Ф, [Ф1 | С], [Ф1 | С1] ) :-
перест( П, Ф, С, С1).
расст( X/Y, X1/Y1, Р) :-
% Манхеттеновское расстояние между клетками
расст1( X, X1, Рх),
расст1( Y, Y1, Ру),
Р is Рх + Py.
расст1( А, В, Р) :-
Р is А-В, Р >= 0, ! ;
Р is B-A.
% Эвристическая оценка h равна сумме расстояний фишек
% от их "целевых" клеток плюс "степень упорядоченности",
% умноженная на 3
h( [ Пусто | Спис], H) :-
цель( [Пусто1 | Цспис] ),
сумрасст( Спис, ЦСпис, Р),
упоряд( Спис, Уп),
Н is Р + 3*Уп.
сумрасст( [ ], [ ], 0).
сумрасст( [Ф | С], [Ф1 | С1], Р) :-
расст( Ф, Ф1, Р1),
сумрасст( С, Cl, P2),
Р is P1 + Р2.
упоряд( [Первый | С], Уп) :-
упоряд( [Первый | С], Первый, Уп).
упоряд( [Ф1, Ф2 | С], Первый, Уп) :-
очки( Ф1, Ф2, Уп1),
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Prolog»
Представляем Вашему вниманию похожие книги на «Prolog» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.

Обсуждение, отзывы о книге «Prolog» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.