Неизвестно - Prolog
Здесь есть возможность читать онлайн «Неизвестно - Prolog» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: Старинная литература, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Prolog
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:3 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Prolog: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Prolog»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Prolog — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Prolog», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
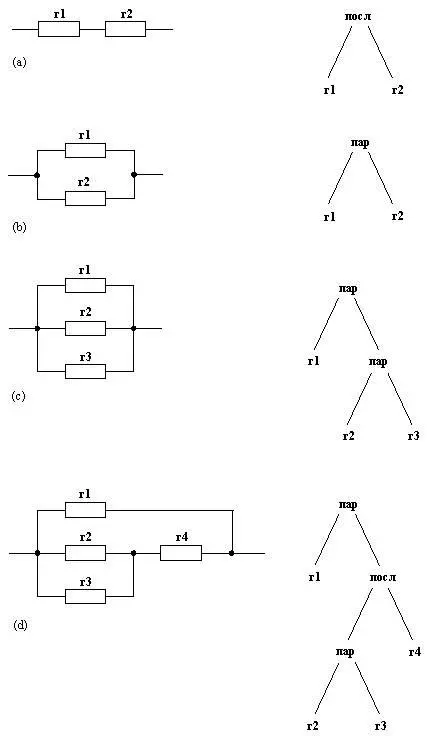
Мы реализуем этот механизм программно при помощи усовершенствования программы поиска в ширину (рис. 11.13). Множество путей-кандидатов представим деревом. Дерево будет изображаться в программе в виде терма, имеющего одну из двух форм:
(1) л( В, F/G)- дерево, состоящее из одной вершины (листа); В - вершина пространства состояний, G - g ( B) (стоимость уже найденного пути из стартовой вершины в В); F- f ( В) = G + h ( В).
(2) д( В, F/G, Пд)- дерево с непустыми поддеревьями; В - корень дерева, Пд - список поддеревьев; G - g ( B); F - уточненное значение f ( В), т.е. значение f для наиболее перспективного преемника вершины В; список Пд упорядочен в порядке возрастания f -оценок поддеревьев.
Уточнение значения f необходимо для того, чтобы дать программе возможность распознавать наиболее перспективное поддерево (т.е. поддерево, содержащее наиболее перспективную концевую вершину) на любом уровне дерева поиска. Эта модификация f -оценок на самом деле приводит к обобщению, расширяющему область определения функции f . Теперь функция f определена не только на вершинах, но и на деревьях. Для одновершинных деревьев (листов) n остается первоначальное определение
f( n) = g( n) + h( n)
Для дерева T с корнем n , имеющем преемников m 1 , m 2 , ..., получаем
f( T) = min f( m i)
i
Программа поиска с предпочтением, составленная в соответствии с приведенными выше общими соображениями, показана на рис 12.3. Ниже даются некоторые дополнительные пояснения.
Так же, как и в случае поиска в ширину (рис. 11.13), ключевую роль играет процедура расширить, имеющая на этот раз шесть аргументов:
расширить( Путь, Дер, Предел, Дер1, ЕстьРеш, Решение)
Эта процедура расширяет текущее (под)дерево, пока f -оценка остается равной либо меньшей, чем Предел.
% Поиск с предпочтением
эврпоиск( Старт, Решение):-
макс_f( Fмакс). % Fмакс > любой f-оценки
расширить( [ ], л( Старт, 0/0), Fмакс, _, да, Решение).
расширить( П, л( В, _ ), _, _, да, [В | П] ) :-
цель( В).
расширить( П, л( В, F/G), Предел, Дер1, ЕстьРеш, Реш) :-
F <= Предел,
( bagof( B1/C, ( после( В, В1, С), not принадлежит( В1, П)),
Преемники), !,
преемспис( G, Преемники, ДД),
опт_f( ДД, F1),
расширить( П, д( В, F1/G, ДД), Предел, Дер1,
ЕстьРеш, Реш);
ЕстьРеш = никогда). % Нет преемников - тупик
расширить( П, д( В, F/G, [Д | ДД]), Предел, Дер1,
ЕстьРеш, Реш):-
F <= Предел,
опт_f( ДД, OF), мин( Предел, OF, Предел1),
расширить( [В | П], Д, Предел1, Д1, ЕстьРеш1, Реш),
продолжить( П, д( В, F/G, [Д1, ДД]), Предел, Дер1,
ЕстьРеш1, ЕстьРеш, Реш).
расширить( _, д( _, _, [ ]), _, _, никогда, _ ) :- !.
% Тупиковое дерево - нет решений
расширить( _, Дер, Предел, Дер, нет, _ ) :-
f( Дер, F), F > Предел. % Рост остановлен
продолжить( _, _, _, _, да, да, Реш).
продолжить( П, д( В, F/G, [Д1, ДД]), Предел, Дер1,
ЕстьРеш1, ЕстьРеш, Реш):-
( ЕстьРеш1 = нет, встав( Д1, ДД, НДД);
ЕстьРеш1 = никогда, НДД = ДД),
опт_f( НДД, F1),
расширить( П, д( В, F1/G, НДД), Предел, Дер1,
ЕстьРеш, Реш).
преемспис( _, [ ], [ ]).
преемспис( G0, [В/С | ВВ], ДД) :-
G is G0 + С,
h( В, Н), % Эвристика h(B)
F is G + Н,
преемспис( G0, ВВ, ДД1),
встав( л( В, F/G), ДД1, ДД).
% Вставление дерева Д в список деревьев ДД с сохранением
% упорядоченности по f-оценкам
встав( Д, ДД, [Д | ДД] ) :-
f( Д, F), опт_f( ДД, F1),
F =< F1, !.
встав( Д, [Д1 | ДД], [Д1 | ДД1] ) ) :-
встав( Д, ДД, ДД1).
% Получение f-оценки
f( л( _, F/_ ), F). % f-оценка листа
f( д( _, F/_, _ ) F). % f-оценка дерева
опт_f( [Д | _ ], F) :- % Наилучшая f-оценка для
f( Д, F). % списка деревьев
опт_f( [ ], Fмакс) :- % Нет деревьев:
мaкс_f( Fмакс). % плохая f-оценка
мин( X, Y, X) :-
Х =< Y, !.
мин( X, Y, Y).
Рис. 12. 3. Программа поиска с предпочтением.
Аргументы процедуры расширитьимеют следующий смысл:
Путь Путь между стартовой вершиной и корнем дерева Дер.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Prolog»
Представляем Вашему вниманию похожие книги на «Prolog» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.

Обсуждение, отзывы о книге «Prolog» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.