Feynmann - Feynmann 5
Здесь есть возможность читать онлайн «Feynmann - Feynmann 5» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: Старинная литература, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Feynmann 5
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Feynmann 5: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Feynmann 5»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Feynmann 5 — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Feynmann 5», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
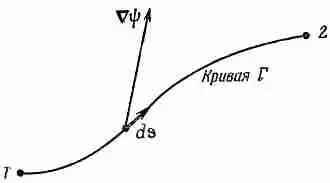
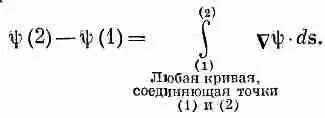
Фиг. 3.1. Иллюстрация уравнения (3.1).
Вектор С ш вычисляется на линейном элементе ds .
Позже, однако, когда задачи станут потруднее, этими простыми методами мы больше обойтись не сможем.
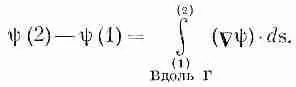
Мы начнем с той интегральной формулы, куда входит градиент. Мысль, которая содержится в ней, очень проста: раз градиент есть быстрота изменения величины поля, то интеграл от этой быстроты даст нам общее изменение поля. Пусть у нас есть скалярное поле ш ( x , у, z). В двух произвольных точках (1) и (2) функция я|з имеет соответственно значения ш(l) и ш(2). [Используется такое удобное обозначение: (2) означает точку (x 2, y 2, z 2), а ш(2) это то же самое, что ш(x 2, y 2, z 2).] Если Г (гамма) — произвольная кривая, соединяющая (1) и (2) (фиг. 3.1), то справедлива
Т Е О Р Е М А 1
(3.1)
Интеграл, стоящий здесь, это криволинейный интеграл от (1) до (2) вдоль кривой Г от скалярного произведения вектора Сш) на другой вектор, ds , являющийся бесконечно малым элементом дуги кривой Г [направленной от (1) к (2)].
Напомним, что мы понимаем под криволинейным интегралом. Рассмотрим скалярную функцию f(x, y, z) и кривую Г, соединяющую две точки (1) и (2). Отметим на кривой множество точек и соединим их хордами, как на фиг. 3.2. Длина i-й хорды равна Ds i,-, где i пробегает значения 1, 2, 3, .... Под криволинейным интегралом
подразумевается предел суммы

где f i— значение функции где-то на i-й хорде. Предел — это то,
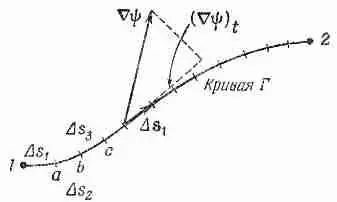
Фиг. 3.2. Криволинейный интеграл есть предел суммы.
к чему стремится сумма, когда растет число хорд (разумным образом, чтобы даже наибольшее Ds i®0).

В нашей теореме (3.1) интеграл означает то же самое, хоть и выглядит чуть по-иному. Вместо f стоит другой скаляр — составляющая Сш в направлении Ds. Если обозначить эту составляющую через (Сш) t , то ясно, что
(3.2)
Интеграл в (3.1) и подразумевает сумму таких членов.

А теперь посмотрим, почему уравнение (3.1) правильно. В гл. 1 мы показали, что составляющая Сш вдоль малого смещения DR равна быстроте изменения ш в направлении DR. Рассмотрим хорду кривой Ds от точки (1) до точки а на фиг. 3.2. По нашему определению
(3.3)
Точно так же мы имеем

(3.4)

где, конечно, (Сш) 1означает градиент, вычисленный на хорде Ds 1, a (Сш) 2— градиент, вычисленный на Ds 2. Сложив (3.3) и (3.4), получим
(3.5)
Вы видите, что, продолжая прибавлять такие члены, мы получаем в итоге

(3.6)
Левая часть не зависит от того, как выбирать интервалы — лишь бы точки (1) и (2) были теми же самыми, так что справа можно перейти к пределу. Так доказывается уравнение (3.1). Из нашего доказательства видно, что, подобно тому как равенство не зависит и от выбора точек а, b , с,..., точно так же оно не зависит от выбора самой кривой Г. Теорема верна для любой кривой, соединяющей точки (1) и (2).
Два слова об обозначениях. Не будет путаницы, если писать для удобства

(3.7)
Тогда наша теорема примет такой вид:
Т Е О Р Е М А 1
(3.8)
§ 2. Поток векторного поля
Прежде чем рассматривать следующую интегральную теорему — теорему о дивергенции,— хотелось бы разобраться в одной идее, смысл которой в случае теплового потока легко усваивается. Мы уже определили вектор h, представляющий количество тепла, протекающего сквозь единицу площади в единицу времени. Положим, что внутри тела имеется замкнутая поверхность S , ограничивающая объем V (фиг. 3.3). Нам хочется узнать, сколько тепла вытекает из этого объема. Мы это можем, конечно, определить, рассчитав общий тепловой поток через поверхность S .
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Feynmann 5»
Представляем Вашему вниманию похожие книги на «Feynmann 5» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.
Обсуждение, отзывы о книге «Feynmann 5» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.