Feynmann - Feynmann 1
Здесь есть возможность читать онлайн «Feynmann - Feynmann 1» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: Старинная литература, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Feynmann 1
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Feynmann 1: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Feynmann 1»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Feynmann 1 — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Feynmann 1», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
F x = x , F y = y , F z = z или соответственно
F х ' = х' ,F у' = у ' , F z ' = z '.
Тот факт, что физические соотношения между какими-либо величинами можно выразить в виде векторных уравнений, говорит о том, что эти соотношения верны в любой системе координат. Вот почему понятие вектора очень удобно в физике.
Давайте теперь рассмотрим некоторые свойства векторов. В качестве примера «вектора» можно указать скорость, импульс, силу и ускорение. Часто бывает удобно изобразить вектор в виде стрелки, указывающей направление действия. Но почему же можно представить силу стрелкой? Да потому, что она преобразуется по тем же законам, что и «шаг в пространстве». Именно поэтому можно представить силу в виде чертежа, как если бы это изображалось перемещение, причем выберем такой масштаб, чтобы единица силы, например ньютон, соответствовала некоторой длине. Проделав такую процедуру однажды, мы всегда сможем изображать силы в виде отрезков, потому что уравнение типа
F=kr
(где k — некоторая постоянная) имеет вполне определенный смысл. Возможность представлять силу отрезком сулит нам большие выгоды, потому что, изобразив отрезок или стрелку, можно не заботиться о координатных осях. При этом, конечно, всегда можно быстро подсчитать, как изменяются составляющие вектора при поворотах осей, потому что дело сводится к простому геометрическому построению.
§ 5. Векторная алгебра
Теперь мы должны описать законы, или правила, 'регулирующие возможные сочетания различных векторов. Прежде всего мы изучим сумму двух векторов. Пусть векторы а и b задаются в какой-нибудь системе координат составляющими а х , a y , a z и b x , b y , b z . Предположим, что кому-то пришло в голову составить три числа а х + b x , a y + b y , а г + b z . Получим ли мы в результате вектор? Вы можете сказать: «Разумеется, ведь это три числа, а три числа образуют вектор». Нет, вектор образуют не любые три числа! Чтобы задать вектор, мы должны связать заданные нам три числа с координатной системой так, чтобы при повороте координатных осей эти числа «поворачивались» относительно друг друга и «перемешивались» по описанным ранее правилам. Таким образом, мы должны выяснить, во что превращаются числа а х + b х , а y + b y , a z + b г , если известно, что при изменении системы координат числа а х , а у , a z переходят в а ' х , а ' у , a ' z , а b х , b у , b г переходят в b ' x , b ' y , b ' г? Получим ли мы после поворота координатных осей числа а ' х + b ' x , a ' y + b ' y , a ' z + b ' z ? Ответ, конечно, будет утвердительным, потому что наше основное уравнение (11 :5) определяет так называемое линейное преобразование. Если мы применим это преобразование к а х и b х и вычислим а х + b x то окажется, что преобразованное а х + b х есть то же самое, что и а х + b х . «Складывая» векторы а и b по только что описанному правилу, мы получаем новый вектор c. Мы запишем это так:
с= а+ b.
Вектор с обладает интересным свойством:
с= b+ а;
это легко проверить, написав составляющие вектора с. Кроме того,
а+( b+ с)=( а+ b) + с.
Векторы можно складывать в любом порядке.
Каков геометрический смысл а+b? Как будет выглядеть вектор с, если мы, скажем, изобразим аи bс помощью стрелок? Ответ на этот вопрос дает фиг. 11.4.
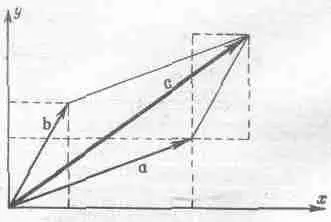
Фиг. 11 . 4 . Сложение векторов.
Мы видим, что прибавить составляющие вектора b к составляющим вектора а проще всего, приложив соответствующим образом прямоугольник, определяемый составляющими b, к такому же прямоугольнику, определяемому составляющими а. Поскольку а и b хорошо подогнаны к своим прямоугольникам, то это все равно, что поставить вектор b «ногами» на «голову» вектору а. Стрелка, соединяющая «ноги» вектора а и «голову» вектора b, и будет вектором с. Можно поступить иначе: поставить «ноги» а на «голову» b. Вспомнив геометрические свойства параллелограмма, можно убедиться в том, что мы снова получим тот же вектор с. Заметим, что, ставя векторы друг на друга, мы складываем их без помощи координатных осей.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Feynmann 1»
Представляем Вашему вниманию похожие книги на «Feynmann 1» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.
Обсуждение, отзывы о книге «Feynmann 1» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.