Fog Computing
Здесь есть возможность читать онлайн «Fog Computing» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: unrecognised, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Fog Computing
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Fog Computing: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Fog Computing»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
focuses on the technological aspects of employing fog computing in various application domains, such as smart healthcare, industrial process control and improvement, smart cities, and virtual learning environments. In addition, the Machine-to-Machine (M2M) communication methods for fog computing environments are covered in depth.
Presented in two parts—Fog Computing Systems and Architectures, and Fog Computing Techniques and Application—this book covers such important topics as energy efficiency and Quality of Service (QoS) issues, reliability and fault tolerance, load balancing, and scheduling in fog computing systems. It also devotes special attention to emerging trends and the industry needs associated with utilizing the mobile edge computing, Internet of Things (IoT), resource and pricing estimation, and virtualization in the fog environments.
Includes chapters on deep learning, mobile edge computing, smart grid, and intelligent transportation systems beyond the theoretical and foundational concepts Explores real-time traffic surveillance from video streams and interoperability of fog computing architectures Presents the latest research on data quality in the IoT, privacy, security, and trust issues in fog computing
provides a platform for researchers, practitioners, and graduate students from computer science, computer engineering, and various other disciplines to gain a deep understanding of fog computing.
Fog Computing — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Fog Computing», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Today, researchers of industry and academia have been broadly using edge computing as the exchangeable term with fog computing. However, National Institute of Standards and Technology (NIST) and the document of IEEE 1934 standard for fog computing reference architecture, which derives from OpenFog Consortium, have specifically explained the differences between fog computing and edge computing. Accordingly, “the Edge computing is the network layer encompassing the end-devices and their users, to provide, for example, local computing capability on a sensor, metering or some other devices that are network-accessible” [10]. Further, based on the literature in edge computing domain, which include cloudlet-based computing models [11], one can explicitly identify that edge computing is loosely a bottom-up model. Specifically, an edge computing-integrated system emphasizes task offloading from the end-devices to the nearby cloudlet resources, which are capable of providing Virtual Machine (VM) or containers engine (e.g. Docker 1 )-based service to the other nodes within the same subnet.
On the other hand, fog computing is a hierarchical top-down model in which the system specifically tackles the problem about how to utilize the intermediate networking nodes between the central cloud and the end-devices to improve the overall performance and efficiency. Commonly, such intermediate nodes are Internet gateways such as routers, switches, hubs (e.g. an adaptor that interconnects Bluetooth-based device to IP network). Moreover, a fog node is capable of providing five basic services – storage, compute, acceleration, networking, and control [1]. Correspondingly, when a cloudlet or an IoT device is providing gateway mechanism to the other nodes and they are capable of providing some or all of the basic fog services, we also consider them as fog nodes.
By extending the notion above, MFC is the subset of fog computing that addresses mobility-awareness. Specifically, MFC involves two types – infrastructural fog (iFog)-assisted mobile application and mobile fog node (mFog)-assisted application. In summary, iFog-assisted mobile application enhances the performance of a cloud-centric mobile application by migrating the processes from the central cloud to the stationary fog nodes (e.g. the cellular base station) that are currently connecting with the mobile IoT devices. On the other hand, mFog-assisted applications host fog services on mobile gateways (e.g. in-vehicle gateway devices or smartphones) that interconnect other devices (e.g. onboard sensors, body sensors, etc.) or other things (e.g. proximal cars, people, sensors, etc.) to the cloud.
1.3 The Needs of Mobile Fog Computing
MFC encompasses four application domains: land vehicular applications, marine applications, unmanned aerial vehicular applications, and UE-based applications. Specifically, each domain involves both iFog- and mFog-based architecture. Ideally, the approaches of iFog aim to provide generic solutions that are applicable to all the MFC domains where the infrastructure is applicable. On the other hand, mFog-based approaches aim to overcome the challenges in which the iFog is inapplicable or is unable to resolve effectively. To clarify the terminologies used in the rest of the chapter, iFog denotes infrastructural fog node and mFog represents the generic term of mobile fog nodes. Moreover, we further classify mFog to four types: LV-Fog, Marine Fog, UAV-Fog, and user equipment-based fog (UE-fog) corresponding to the mobile fog node hosted on a land vehicle, a vessel, a UAV, and a UE (e.g. smartphone, tablet, etc.).
1.3.1 Infrastructural Mobile Fog Computing
1.3.1.1 Road Crash Avoidance
The number of vehicles on the road is increasing every year as well as the number of road accidents [12]. In order to reduce or avoid the collision accident, academic and industrial researchers have been working on improving the safety aspect of the vehicles. Specifically, the advancement in communication technologies has allowed the development of advanced driver-assistance systems (ADAS), which has emerged as an active manner of preventing car crashes. ADAS has made many achievements through the development of systems that include rear-end collision avoidance and forward collision warning (FCW). The vehicle-to-vehicle (V2V) communication plays a big role in ADAS systems and it is manifested in ensuring that the controllers on board the vehicles (i.e. onboard unit, OBU) are capable of communicating with other vehicles for the purpose of negotiating maneuvers in the intersections and applying automatic control when it is necessary to avoid collisions [13]. The success of these systems relies a lot on the reliability of the communication. Therefore, many models of V2V communication have been investigated. Some of them focus on probabilities and analytic approaches in modeling the communication message reception while others adapt Markovian methods to assess the performance and reliability of the safety-critical data broadcasting in IEEE 802.11p vehicular network [14]. Vehicular ad-hoc network (VANET) has also contributed to integrate and improve the car-following model or platooning, which reduces the risks of collisions and makes the driving experience safer [15]. Explicitly, today's smart vehicular network systems have applied the fog computing mechanisms that utilize the cloud-connected OBUs of the vehicle to process the data from the onboard sensors toward exchanging context information in the vehicular network and participating in the intelligent transport systems.
1.3.1.2 Marine Data Acquisition
Today, marine data acquisition and cartography systems can achieve low-cost data acquisition and processing by composing IoT, mobile ad hoc network (MANET), and delay-tolerant networking (DTN) technologies. Specifically, sea vessels, which equip multiple sensors, can utilize International Telecommunication Union (ITU) standards-based very high frequency (VHF) data exchange system to route the sensory data to the gateway node (i.e. cellular base station) at the shore via the ship-based MANET. Afterwards, the gateway can relay the data to the central cloud. In general, such an architecture may produce many duplicated sensory transmission readings due to the redundant data transmitted from different ships. In order to remove such duplication and to improve the efficiency, the system can deploy fog computing service at the gateway nodes to preprocess the sensory data toward preventing the gateways sending duplicated data to the central server [4].
1.3.1.3 Forest Fire Detection
Emerged smart UAVs, which are relatively inexpensive and can be flexibly dispatched to a large area under different weather conditions, both during day and night, without human involvement are the ideal devices to handle forest fire detection and firefighting missions. Specifically, with onboard image detection mechanism and mobile Internet connectivity, UAVs can provide real-time event reporting to the distant central management system. Further, in order to extend the sustainability of the image-based sensing mission, the system can distribute the computational image detection program to the proximal iFog hosted on cellular base stations and made accessible via standard communication technologies, such as Long-Term Evolution (LTE), SigFox, NB-IoT, etc. Hence, the UAVs can use their battery power only for flying and sensing tasks [16] ( Figure 1.1).
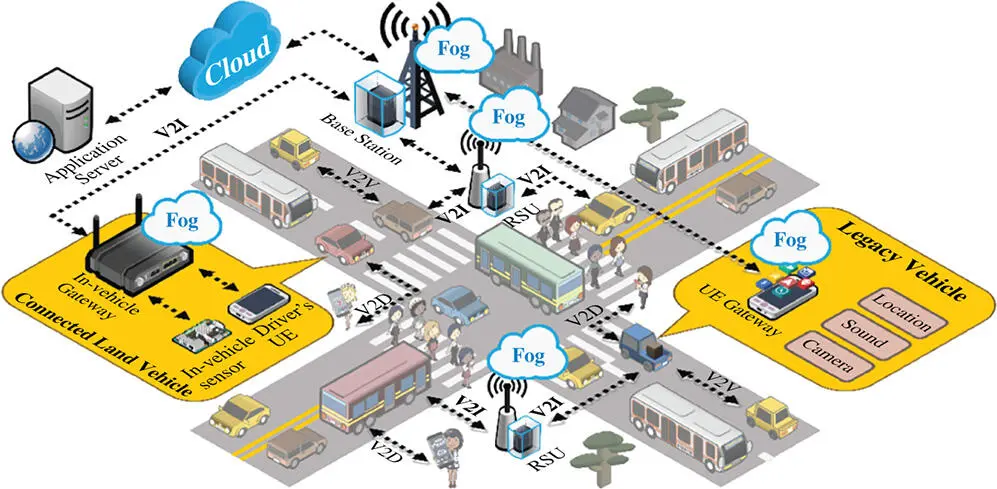
Figure 1.1 Land-vehicular fog computing examples. ( See color plate section for the color representation of this figure )
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Fog Computing»
Представляем Вашему вниманию похожие книги на «Fog Computing» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.








Обсуждение, отзывы о книге «Fog Computing» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.