Fog Computing
Здесь есть возможность читать онлайн «Fog Computing» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: unrecognised, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Fog Computing
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Fog Computing: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Fog Computing»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
focuses on the technological aspects of employing fog computing in various application domains, such as smart healthcare, industrial process control and improvement, smart cities, and virtual learning environments. In addition, the Machine-to-Machine (M2M) communication methods for fog computing environments are covered in depth.
Presented in two parts—Fog Computing Systems and Architectures, and Fog Computing Techniques and Application—this book covers such important topics as energy efficiency and Quality of Service (QoS) issues, reliability and fault tolerance, load balancing, and scheduling in fog computing systems. It also devotes special attention to emerging trends and the industry needs associated with utilizing the mobile edge computing, Internet of Things (IoT), resource and pricing estimation, and virtualization in the fog environments.
Includes chapters on deep learning, mobile edge computing, smart grid, and intelligent transportation systems beyond the theoretical and foundational concepts Explores real-time traffic surveillance from video streams and interoperability of fog computing architectures Presents the latest research on data quality in the IoT, privacy, security, and trust issues in fog computing
provides a platform for researchers, practitioners, and graduate students from computer science, computer engineering, and various other disciplines to gain a deep understanding of fog computing.
Fog Computing — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Fog Computing», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
2.4.2.1 Smart Traffic Light System
In a smart traffic light system scenario, the objective is to lower the congestion in the city and optimize traffic flow. The immediate outcome of adopting this approach is the protection of the environment by lowering CO 2emissions and reducing fuel consumption. Enabling an optimization like this requires the implementation of a hierarchical approach that enables real-time and near real-time operations, as well as analysis of data over long periods of time.
Each intersection in the city represents a component of our system where a smart traffic light application is deployed. The application is in charge of analyzing the collected data from local sensors and CCTV cameras and performs three major tasks: (1) compute the distance of every approaching vehicle in all directions and adapt the traffic light accordingly; (2) monitor pedestrians and cyclists to prevent any accidents, and (3) collect relevant data to help improve the overall system performance. Note that these functionalities require fast response time in case of (1) and (2), the exception being the last functionality (3), which only sends data to a higher layer for further investigation, without waiting for a response.
Another important component of our use case is the global node that creates a control function for each intersection. The key role for a global node is to collect all data from each smart traffic light and determine different commands, such that a steady flow of traffic is maintained. Notice that compared with the time requirements for the tasks deployed at an intersection, the functionality here requires a near real-time response.
The aforementioned hierarchical architecture of our traffic light system benefits from the advantages introduced by the fog computing paradigm. An immediate advantage over the cloud computing paradigm is its capabilities of orchestrating a wide range of distributed devices placed at each intersection. At the same time, it enables devices capable of analyzing data and performing fast response-time actions. Our system can be designed as a four-layer architecture, composed by the sensor layer, a fog device layer present locally at each intersection, another fog layer composed of the global node and the cloud layer. An overview of this architecture is presented in Figure 2.7.
2.4.2.2 Smart Pipeline Monitoring System
The smart pipeline monitoring system is an application deployed in the concept of smart cities, with the scope of monitoring the integrity of pipelines and preventing any serious economic and ecologic consequences. As an illustration, consider the case in which a pipeline that transports extracted oil from an offshore platform has failed, and the repercussion of failure has a big impact on the environment.
A pipeline system has an important role in our lives, being an essential infrastructure used to transport gas and liquids. It spreads throughout the entire city and provides us with basic needs like drinkable water. However, the integrity of a pipeline diminishes due to aging and sudden environmental changes. In the end, the risk of failure rises as corrosion and leaks appear.
To prevent such threats, a pipeline monitoring system has the capabilities of detecting any serious threats, reducing the overall failure by predicting three types of emergencies: (1) local disturbances (leakage, corrosion), (2) significant perturbations (damaged pipelines or approaching fire), and (3) city emergency situations. Since the infrastructure covers an entire city, our use case requires an architecture that supports geo-distribution of devices and low/predictable latency. An immediate solution is a four-layer fog computing architecture, described in Figure 2.8.
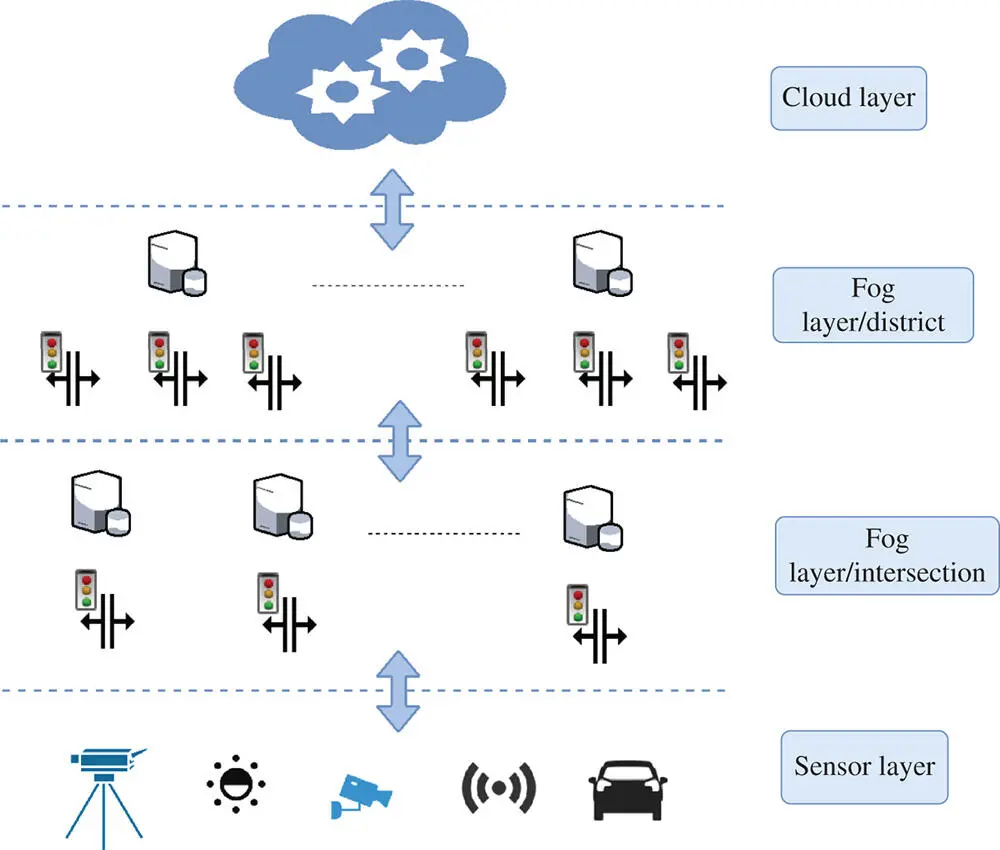
Figure 2.7 Smart Traffic light system.
As in the case of a smart traffic light system, the fog architecture requires distinct layers to enable different time-scale responses. Depending on how wide the monitored area is, four or more layers can be used. The first layer represents the cloud and has the purpose of offering a global perspective of the entire system. In this layer, hard computational analysis is performed to prevent and respond to citywide disasters. Since the layer performs analysis on historical data, it does not require real-time or near real-time responses. Following, the second layer represents fog devices that are responsible to prevent any failure, at a smaller scale than cloud, in every neighborhood. The key purpose behind this layer is to identify potential hazardous events, based on the collected measurements from multiple devices. In this situation, near real-time responses are required for better prediction. Next, the third layer is composed of local fog nodes that identify potential threats based on the data received from the sensors and act by outputting control signals when it is necessary for fast recovery from a found threat. Furthermore, these devices process the raw data and prepare it for the layer above. Finally, the last layer is represented by sensors that generate measurements for the aforementioned layers in the architecture.
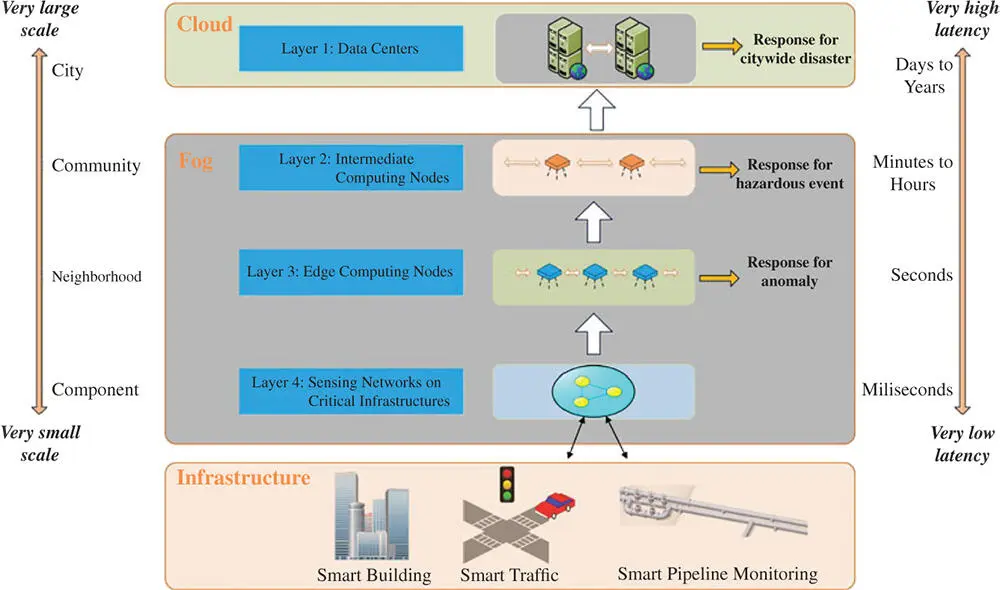
Figure 2.8 Smart pipeline monitoring system architecture.
2.5 Future Challenges
Fog and edge computing vision introduce multiple advantages by migrating some computational resources at the edge of the network. The underlining of these paradigms is to create an IoT network environment covered with a vast amount of interconnected distributed heterogeneous devices having the purpose to deploy and manage demanding applications closer to the user. Yet, it is a nontrivial task to design platforms where all these required characteristics are met.
In this section, we identify and discuss the challenges that these paradigms must conquer in order to fulfill their full potential. We group these challenges in three main areas, i.e. resource management, security, and privacy, and network management.
2.5.1 Resource Management
Moving computational resources from the cloud closer to the end nodes stand in the center of the fog and edge paradigm. Therefore, novel resource management to fully utilize the available resources and process applications in close proximity of the user is imperative to the successful adoption of these systems. Since IoT devices are resource-constrained devices, applying resource management techniques at the edge will allow edge nodes to optimize their resource utilization (e.g. energy-aware smart devices that increase their battery levels by of loading computation to other nearby nodes), improve data privacy, and enable devices to collaborate and share resources to process IoT applications.
A taxonomy of resource management at the edge, based on the current state-of-the-art research in this area, is presented in [28]. According to this classification, a total of five different categories are identified considering the objective of the technique.
The first category refers to resource estimation and represents one of the fundamental requirements in resource management, i.e. the capability of estimating how many resources a certain task requires. This is important for handling the uncertainties found in an IoT network and providing at the same time a satisfactory QoS for deployed IoT applications. The second category is represented by resource discovery and aims to aid the user to discover available resources already deployed at the edge. Resource discovery complements resource estimation by keeping the pool of available computational resources updated.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Fog Computing»
Представляем Вашему вниманию похожие книги на «Fog Computing» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.








Обсуждение, отзывы о книге «Fog Computing» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.