George F. Elmasry - Dynamic Spectrum Access Decisions
Здесь есть возможность читать онлайн «George F. Elmasry - Dynamic Spectrum Access Decisions» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: unrecognised, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Dynamic Spectrum Access Decisions
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:3 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Dynamic Spectrum Access Decisions: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Dynamic Spectrum Access Decisions»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
dynamic spectrum access approach using the latest applications and techniques
Dynamic Spectrum Access Decisions: Local, Distributed, Centralized and Hybrid Designs Dynamic Spectrum Access Decisions · Licensed spectrum bands
· Unlicensed spectrum bands
· Civilian communications
· Military communications
Consisting of a set of techniques derived from network information theory and game theory, DSA improves the performance of communications networks. This book addresses advanced topics in this area and assumes basic knowledge of wireless communications.
Dynamic Spectrum Access Decisions — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Dynamic Spectrum Access Decisions», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
(3.24) 
At any given time, the secondary user would want to decide not to emit spectrum at given sectors as it will interfere with the primary user. In order for the secondary user to reach this decision, it has to fuse the hypotheses of the different sectors. The outcome of the decision fusion process is a filter matrix that can eliminate the use of certain antenna sectors. This elimination matrix can be expressed as:
(3.25) 
where 1 means the sector can emits spectrum to the destination secondary user and Φ means the sector cannot emit spectrum to the destination secondary user.
Note that this decision fusion to reach Equation (3.25)is not straightforward and it requires the consideration of other factors such as the side lobes of the secondary user emitted spectrum. Figure 3.9shows an example of the spectrum emitted by a single sector of the 12‐sector antenna depicted in Figure 3.8and how it is not purely directional. The side and back lobes and the beam width depend on the frequency range, among other factors. For that reason, the union expressions leading to Equation (3.24)are critical in deciding if a sector can be used or not. A simple decision approach would be to consider that the neighboring sectors and the sector at 180° may also emit spectrum in the elimination matrix in Equation (3.25). Another factor to consider is the power emission. If the secondary user has to always consider emitting a signal at relatively low energy to the primary user signal such that the side and back lobes impact in Figure 3.9is minimal, consideration of neighboring sectors would differ and the number of elements with 1 in the matrix in Equation (3.25) would increase.
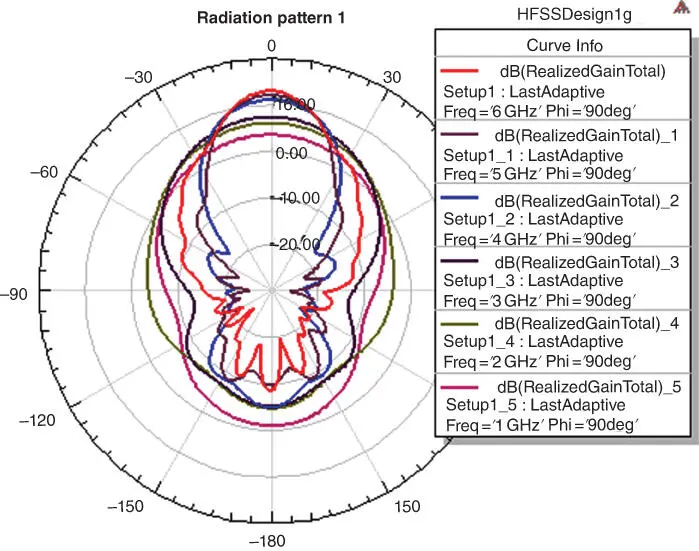
Figure 3.9Example of a single‐sector radiation pattern corresponding to the multi‐sector antenna in Figure 3.8.
Now that we have shown cases for further local decision fusion concepts building on the ROC models, let us move to distributed and centralized decsion fusion that can make the decision fusion results more accurate.
3.3.2 Distributed and Centralized Decision Fusion
Depending on the DSA design, local decision fusion can be communicated to distributed peer nodes or to a centralized arbitrator. Distributed and centralized techniques can estimate a more comprehensive spectrum map of the area of operation. Spectrum awareness can be local (node‐based), distributed (net‐based), or centralized (area‐of‐operation‐based). 23Spectrum awareness can be expressed as a spatial map showing areas of interference per each frequency band used in the area of operation or can be potentially used.
Let us consider the local interference estimation exemplified in Figure 3.7for a local node. Let us also consider that this type of directional interference estimation is shared between peer nodes in a distributed cooperative MANET. Each node can fuse the directional spectrum interference estimation communicated from multiple peer nodes to produce a cooperative spectrum map of the area of interference as shown in Figure 3.10. Notice how the estimated interference area can be larger than the actual interference area as spectrum directional fusion may draw a circle around the estimated overlaid triangles. 24If this sensed frequency is the same frequency used by the MANET, cooperative decisions can be made to continue to use the frequency band or switch to a different frequency band based on the results of the decision fusion.
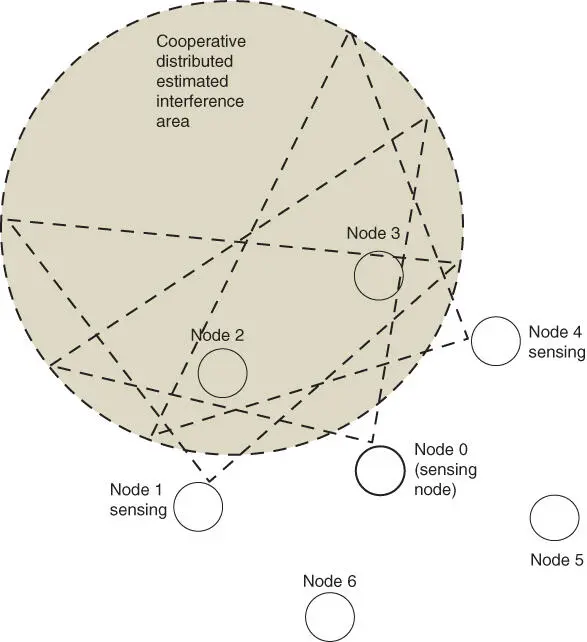
Figure 3.10Cooperative distributed estimation of area of interference.
Figure 3.11shows a case where a distributed cooperative MANET DSA technique estimated the interference area of the frequency band in use by the MANET, f 1. The same DSA technique also estimated the (probed) frequency band f 2, which is a potential frequency band to be used by the MANET. If the MANET trajectory 25is as shown in Figure 3.11, the distributed cooperative decision may continue to use f 1as the MANET will move away from the area where interference of f 1is detected and avoid using f 2. This decision will occur because probing f 2as a potential frequency to use informed the DSA technique that the MANET will encounter interference if it is to switch to f 2. The key point here is for the distributed cooperative MANET to overlay estimated interference areas of the frequency band in use with the estimated spatial areas of use of potential frequency bands and consider other factors such as trajectory to make the best spectrum use decision, which may include avoiding f 2and switching to a third frequency f 3or staying with f 1. Recall that a good DSA design will attempt to avoid the rippling of DSA decisions.
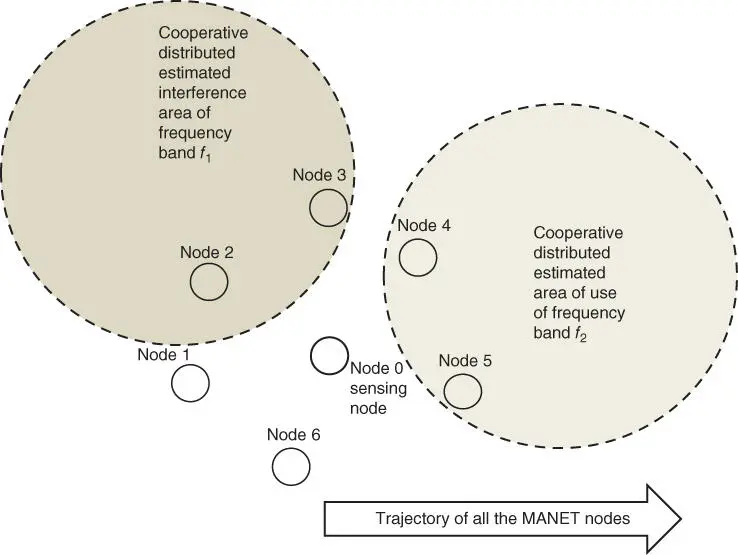
Figure 3.11Cooperative estimation of overlay spatial use of different frequency bands.
A centralized arbitrator can start by using a pool of frequency bands to assign to different heterogeneous networks in a spatially separated manner, as shown in the previous chapter in Figure 2.15. Recall that the goal of the centralized arbitrator is to optimize the spatial use of spectrum resources. The challenge a centralized arbitrator faces with a case like Figure 2.15 is when a certain frequency is interfered with in a certain area, which may require tapping into a larger pool of frequency bands. Figure 3.12shows how the frequency band f 3can suffer from interference, as illustrated with the background large circle indicating the estimated inference area of frequency band f 3forcing the central arbitrator to tap into an additional frequency band f 4, as indicated by the white circle.
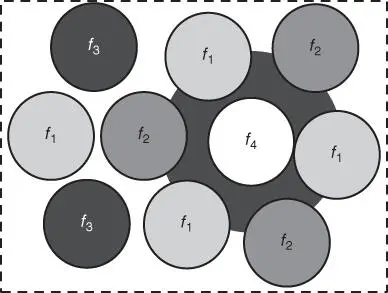
Figure 3.12A centralized arbitrator use of a larger frequency pool to overcome interference.
Decision fusion can occur at the local, distributed or centralized level. It all depends on the system under design. A good DSA design would create appropriate fusions at the appropriate level and share information in an optimal way to make the best use of spectrum resources. DSA is not a single solution to a single problem. Communication systems are complex and bounded by requirements, legacy systems interfacing with more up‐to‐date systems, and other dynamics that can influence the DSA design, information fusion, and decision making. The first three chapters of this book are intended to help the reader gain a broad understanding of DSA design challenges and how to approach DSA design for a given system. The next chapter covers examples of hybrid decision fusion cases and how decision fusion results can be leveraged for other cognitive capabilities such as reactive routing. Chapter 4 will give the reader an idea on how to design a hybrid DSA system while making the appropriate decision fusion local, distributed or centralized considering that DSA is part of the bigger goal of developing cognitive networks.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Dynamic Spectrum Access Decisions»
Представляем Вашему вниманию похожие книги на «Dynamic Spectrum Access Decisions» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.







Обсуждение, отзывы о книге «Dynamic Spectrum Access Decisions» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.