Francisco M. Martínez Verdú - Fundamentos de visión binocular
Здесь есть возможность читать онлайн «Francisco M. Martínez Verdú - Fundamentos de visión binocular» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: unrecognised, на испанском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Fundamentos de visión binocular
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Fundamentos de visión binocular: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Fundamentos de visión binocular»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Fundamentos de visión binocular — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Fundamentos de visión binocular», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
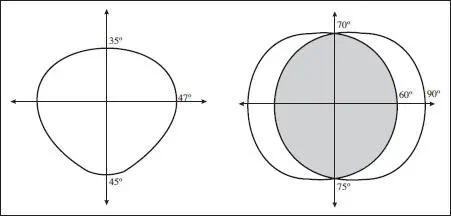
Fig. 1.7 Campo de fijación binocular (izquierda) y campo visual binocular (derecha).
1.6 Grados de visión binocular
Partiendo de una clasificación clásica, que posteriormente se matizará según las teorías modernas, tenemos tres grados de visión binocular:
GRADO I: no existe superposición (fusión neural) de las dos imágenes retinianas, lo cual provoca la visión doble o diplopía .
GRADO II: existe fusión neural pero con algún esfuerzo, como por ejemplo, cuando uno se emborracha y pierde parcialmente la visión binocular estable.
GRADO III: existe fusión neural sin esfuerzo, lo que se denota como visión estereoscópica o haplopía , la cual es la que se considera normal en la mayoría de nosotros.
Esto no significa que, por no ser capaces, de momento, de interpretar la imagen oculta tridimensional de un autoestereograma ( fig. 1.8), no tengamos el grado III. En principio, si poseemos visión binocular aparentemente normal, somos del tipo III. Pero, ¿cómo entonces no percibimos la figura oculta del autoestereograma? Como veremos a lo largo de este libro, todos somos capaces de ver esta imagen tridimensional oculta, pero para ello solamente es necesario controlar la coordinación motora de ambos ojos, la coordinación sensorial, si es normal, se dará automáticamente.
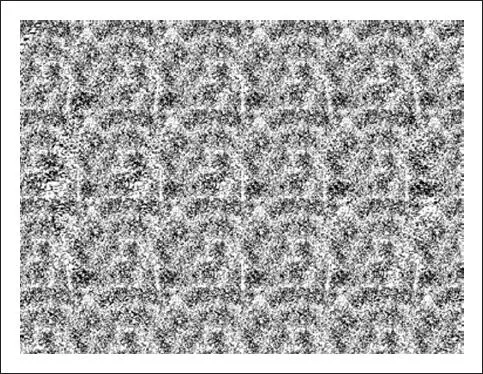
Fig. 1.8 Ejemplo de autoestereograma de puntos aleatorios. ¿Qué figura matemática en tres dimensiones se oculta en la figura?
2. Cinemática del ojo
2.1 Introducción a la motilidad ocular
Los dos globos oculares, con sus anexos (músculos extraoculares, etc.) y conexiones nerviosas con y dentro del córtex visual, forman una entidad indivisible. No obstante, es conveniente analizar separadamente los subsistemas motor y sensorial. A partir de las condiciones para la visión binocular explicadas en el capítulo anterior, el subsistema motor tiene tres funciones principales:
– Incrementar la extensión del campo visual efectivo (monocular y binocular) variando la fijación binocular.
– Trasladar la imagen del objeto de interés a la fóvea y mantenerla allí para aprovechar la máxima agudeza visual de que disponemos.
– Mantener la alineación de los dos ojos para asegurar la percepción haplópica (no doble).
Esto significa que el subsistema oculomotor está al servicio del subsistema sensorial, porque el segundo interviene en las últimas fases de la visión. Por tanto, hemos considerado conveniente comenzar este libro con los aspectos oculomotores, para a continuación relacionarlos con los aspectos sensoriales de la visión binocular.
Esta unidad temática que iniciamos, centrada en la motilidad ocular, consta de cuatro capítulos. Este capítulo se centra en la descripción geométrica de los movimientos monoculares. El capítulo III se dedica a analizar los agentes mecánicos que provocan los movimientos oculares. El capítulo IV se centra en una clasificación estrictamente funcional de los movimientos oculares. Y el capítulo V profundiza en los movimientos binoculares y sus anomalías (forias y estrabismos).
2.2 Conceptos iniciales: ejes, ángulos y pianos de referenda en el ojo
Para lo que sigue, es conveniente listar y definir los conceptos siguientes:
Eje óptico (EO): recta que pasa por los puntos nodales y une todos los centros de curvatura de los dioptrios oculares.
Eje visual (EV): par de rectas paralelas que unen el punto de fijación con la fóvea a través de los puntos nodales N y N'.
Centro de rotatión (CR): punto fijo alrededor del cual se producen los giros del globo ocular, que se considera como una esfera de radio r = 10.5 mm desde el polo oftalmométrico. Se encuentra aproximadamente a 13.5 mm del vértice corneal (Bennett & Rabbetts, 1989: 168).
Eje de fijación: es el eje que une el centro de rotatión del ojo con el punto de fijación.
Eje pupilar: eje normal a la córnea que pasa por el centro de la pupila de entrada.
Línea principal de mirada: es la línea que une el punto objeto con el centro de la pupila de entrada.
Ángulo α: ángulo formado entre el eje visual y el eje óptico. Su valor suele estar entre los 4 y 8°, tomándose un valor estándar de 5°.
Ángulo γ: es el ángulo formado entre el eje de fijación y el óptico. Es mayor que α.
Ángulo κ: es el formado entre el eje pupilar y la línea principal de mirada. Generalmente κ < α.
Todos estos conceptos aparecen en la
fig. 2.1.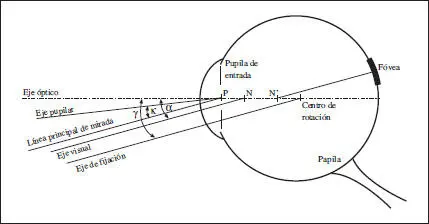
Fig. 2.1 Ejes y ángulos en el ojo.
Ejes de Fick: son los ejes principales de rotación del ojo, es decir, los que resultan de montar un sistema de ejes cartesianos sobre el centro de rotación como origen de referencia ( fig. 2.2).
Plano de Listing: es un plano frontal que contiene el centro de rotación de los dos ojos, es decir, que contiene los ejes de Fick YZ ( fig. 2.2).
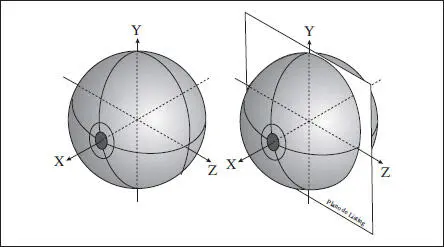
Fig. 2.2 Ejes de Fick y plano de Listing.
2.3 Posición de los ojos en la cabeza
Los ojos se sitúan en las órbitas oculares, cuyas paredes internas son paralelas y de dirección sagital. Las paredes externas forman un ángulo aproximado de 90º. Los ojos se insertan en las órbitas formando un ángulo de 45º, y éstas, con respecto a los ejes visuales paralelos, forman aproximadamente un ángulo de 23º ( fig. 2.3).
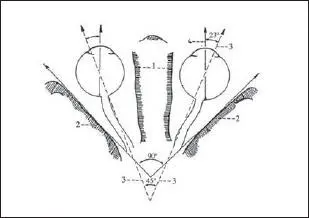
Fig. 2.3 Posición de los ojos en las órbitas oculares (de Hugonnier 1977).
A partir del esquema de la última figura, podemos definir las siguientes posiciones del ojo:
Posición anatómica de reposo: los ojos no están sometidos a ningún tipo de estímulo. Es de ligera divergencia. No tiene interés, ya que es la posición que se da en un cadáver.
Posición fisiológica de reposo: sólo actúa el tono muscular. Es la que toman los ojos bajo anestesia.
Posición primaria: los ojos están mirando un objeto muy lejano a la misma altura que los ojos, lo cual significa tener los dos ejes visuales paralelos. Será siempre la posición inicial de cualquier movimiento ocular, como la marcan los ojos en la fig. 2.3.
Posición disociada: están todos los estímulos presentes, excepto el de fusión.
Posición de fijación: posición normal de los ojos cuando se fijan sobre un punto.
Posición diagnóstica de la mirada: posición forzada de ambos ojos para poner a prueba la acción máxima de cada músculo extraocular (§ Capítulo 5).
2.4 Ducciones
A partir de la definición de los ejes de Fick, cualquier rotación monocular alrededor de uno de estos ejes se denomina movimiento simple o secundario , mientras que cualquier combinación de movimientos o giros alrededor de un eje que no sea de Fick se denomina movimiento oblicuo o terciario .
En función de cuál sea la posición al final del movimiento, definimos:
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Fundamentos de visión binocular»
Представляем Вашему вниманию похожие книги на «Fundamentos de visión binocular» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.



Обсуждение, отзывы о книге «Fundamentos de visión binocular» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.