Intelligent Systems for Rehabilitation Engineering
Здесь есть возможность читать онлайн «Intelligent Systems for Rehabilitation Engineering» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: unrecognised, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Intelligent Systems for Rehabilitation Engineering
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Intelligent Systems for Rehabilitation Engineering: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Intelligent Systems for Rehabilitation Engineering»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Encapsulates different case studies where technology can be used as assistive technology for the physically challenged, visually and hearing impaired.
Audience Intelligent Systems for Rehabilitation Engineering
Intelligent Systems for Rehabilitation Engineering — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Intelligent Systems for Rehabilitation Engineering», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
A systems approach, mechatronics, mobility sensors, cost/benefit ratio, and softness were discussed for rehabilitation robotics [41]. An exoskeleton robot WOTAS was introduced and was loaded with control strategies that were based on biomechanical loading [42]. The analysis and applications of MEMS technology were tested by applying it to exoskeleton-based bio-mechatronic robotic systems [43]. Based on EMG signals, the torque produced by the muscles was determined using a biomechanical model, and it was predicted whether the proposed model was feasible or not [44]. An ankle rehabilitation robotic device was built, and its mechanical performance was tested [45].
1.2.4 Human–Machine Interfacing
Human–machine integration includes the tactics incorporated for better communication between machines and humans. The structure and implementation of CURL language, MUSIIC, RoboGlyph, and multitasking operator robotic system were presented [46]. The architecture of ARCHIN was produced whose task was to integrate machines with humans, and its performance was evaluated [47]. The perspective of human–machine interaction was presented, which included the issues faced by it and the solution to them [48].
1.2.5 Smart Robotics
A 2D vision-based localization system was illustrated, which could identify the light-emitting markers. It was equipped with a web camera and human–machine interaction interface [49]. An attempt was made for bridging the gap between assistive robotic systems and smart homes. Robotic system assisted the patient and smart home adjusted as per the requirements of the patient [50]. An algorithm was proposed for the therapy of impaired patients, which adopted with the patients as they recovered [51]. The feed-forward neural network (FFNN) was used for the determination of EMG signals from eight shoulder muscles [52]. A diagram representing the architecture of the feed-forward neural network (FFNN) to obtain the EMG signal from the different shoulder muscles is shown in Figure 1.1.
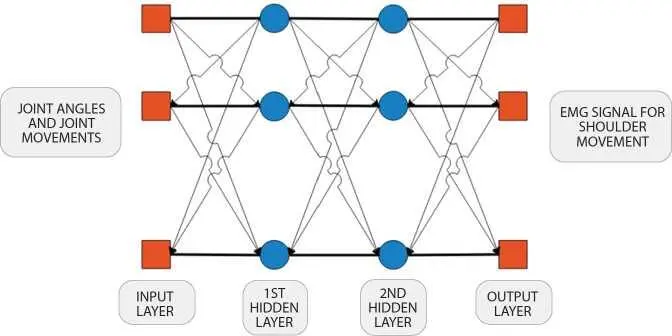
Figure 1.1 The architecture of the feed-forward neural network (FFNN) to obtain EMG signals from shoulder muscles.
Table 1.2 Summary of certain studies which explored smart robotics for rehabilitation.
| Ref. number | Area of rehabilitation robotics explored | Remarks |
| [49] | 2D vision-based localization system | The illustrated system could identify the light-emitting markers. The system was equipped with a web camera along with a human–machine interaction interface. |
| [50] | Assistive rehabilitation robotics and smart homes | The proposed methodology bridged the gap between these two aspects. The robotic systems extended the movement of patients and smart homes accessed their requirements and made necessary changes in itself. |
| [51] | A novel algorithm for impaired patients’ therapy | The proposed algorithm exploited the similarities between motor recovery and motor learning, which adopted with the patients as they recovered. |
| [52] | Feed-forward neural network (FFNN) | FFNN was used for predicting the EMG signals from eight shoulder muscles of patients. |
| [53] | VR strategies | VR was integrated with multimodal displays, which enhanced the performance and also provided feedback information to the patient and motivated the patients using additional audiovisual features. |
| [54] | Neural networkingbased facial emotion interpreter | Thermal images of persons who suffered from speech disorder were prepared, and then using a confusion matrix, its performance was evaluated. |
| [55] | Decision-making ability | Task-oriented robots were studied and were tested on BAXTER to check whether it was able to assist the person for training or not. |
VR technology was integrated with multimodal displays, which provided feedback information to the patient and motivated him [53]. The facial emotions were determined using the thermal images for speech disorder patients using a confusion matrix [54]. The decision-making ability of task-oriented rehabilitation robot was tested on BAXTER robot, and its feasibility was determined [55]. A synopsis of the above discussion on the smart robotics being employed for rehabilitation purposes is deliberated in Table 1.2.
Table 1.2summarizes some of the work that presented smart robotics for rehabilitation purposes. The work done in VR and NN technologies will instigate future research in this field.
1.2.6 Control and Stability Analysis of Robotic Systems
The stability of teaching-in method was estimated by applying it to rehabilitation robotics where it is the least error and fastest settling force was also calculated [56]. The prototype of device that enabled humans to feel and visualize synthetic objectives was designed [57]. Development of pneumatic controlled orthosis was described for stroke patients, and it was capable of position control of the robotic arm [58]. Design and interfacing of active leg exoskeleton (ALEX) were described for patients with impairment in which active force-field controller was used [59]. The complex nature of bio-cooperative rehabilitation systems and its control strategies was discussed. The probable solution to these problems was also described [60]. The stability analysis of rehabilitation robotics was presented, which consisted of the design of a controller to suppress the unintended movements [61]. An admittance control algorithm was applied on an underdevelopment rehabilitation robotics, and its preliminary report was generated [62]. The summary of the control aspects and the stability issues are presented in Table 1.3.
Thus, Table 1.3enlists some of the work done in the field of control theory and stability analysis associated with robotics employed for rehabilitation purposes.
Table 1.3 Summary of certain articles on the control and stability analysis.
| Ref. number | Area of rehabilitation robotics explored | Remarks |
| [56] | Stability of teaching-in method | The stability was analyzed applying it to rehabilitation robotics. The least error and fastest settling force were also calculated, and analysis was done on the elasticity of force sensor. |
| [57] | Devices that allowed humans to visualize and feel | The prototype required motor control and the ability to learn about human motor tasks and capability to adapt to different situations. |
| [58] | Pneumatic actuated orthosis | The system was developed for stroke patients. The system was capable of performing position control of the robotic arm and learning from the movement and storing it for movement the next time. |
| [59] | Design and interfacing of active leg exoskeleton (ALEX) | The device included a force-field controller for applying forces for proper movement, and the experimental results based on it were also presented. |
| [60] | Importance of psychological factors in rehabilitation | The article described challenges faced while using the closed-loop control of bio-cooperative rehabilitation systems. |
| [61] | Method for the stability analysis | The method consisted of the ability to customize as per the recovery rate of the patient and had a controller to suppress the unintended movements. |
| [62] | Admittance control algorithm on hand rehabilitation | The system consisted of a single degree of freedom. The robot was under development, and a preliminary report was generated, which showed positive results. |
1.2.7 Assistive Robotic Systems
Интервал:
Закладка:
Похожие книги на «Intelligent Systems for Rehabilitation Engineering»
Представляем Вашему вниманию похожие книги на «Intelligent Systems for Rehabilitation Engineering» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.







Обсуждение, отзывы о книге «Intelligent Systems for Rehabilitation Engineering» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.