Handbook of Intelligent Computing and Optimization for Sustainable Development
Здесь есть возможность читать онлайн «Handbook of Intelligent Computing and Optimization for Sustainable Development» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: unrecognised, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Handbook of Intelligent Computing and Optimization for Sustainable Development
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Handbook of Intelligent Computing and Optimization for Sustainable Development: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Handbook of Intelligent Computing and Optimization for Sustainable Development»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
This book provides a comprehensive overview of the latest breakthroughs and recent progress in sustainable intelligent computing technologies, applications, and optimization techniques across various industries.
Audience Handbook of Intelligent Computing and Optimization for Sustainable Development
Handbook of Intelligent Computing and Optimization for Sustainable Development — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Handbook of Intelligent Computing and Optimization for Sustainable Development», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
6.2.7.3.4 Mission
In this model, UAV flight is already defined. They will go according to the plan and when message is delivered to the destination nodes mobility model files updated. For every flight, rates and path is defined and updated for the next flight. If there is more time for the flight, UAV will change the direction and continue to fly as shown in Figure 6.8.
6.2.8 Types of Communication
6.2.8.1 MANET
In SPANs, mobile nodes work with the help of Wi-Fi. While in iMANETs all types of protocols are used for communication. Third type is VANETs in which vehicle perform the data transfer process.
6.2.8.2 VANET
6.2.8.2.1 Inter-Vehicle Communication
It uses multiple-hop system to send data from source to the many receivers within the vehicles.
6.2.8.2.2 Vehicle-To-Roadside Communication
The communication happens with the vehicle and within the around premises. Data is transferred through multiple hops until data is reached to the destination.
6.2.8.3 FANET
• Air-to-air wireless communications.
• Air-to-ground wireless communications.
6.2.8.3.1 Air-to-Air Wireless Communication
There is limitation for communication between UAVs and ground station. For ease, we should use air to air communication for data transmission from source to destination.
6.2.8.3.2 Air to Ground Wireless Communication
For air to ground communication, we have to establish a new infrastructure to communicate to ground stations. FANETs are different from MANETs and VANETs, and we need high range due to wide distance between the nodes
1 1. Multi-UAV cooperationTo perform a task with the FANETs, we need a large number of UAV. More UAV more chances of accurate detection, targeting, monitoring, and tracking and in emergency situation
2 2. UAV-to-ground tasksIn this, we involve human operator to help UAV to take right decision in the task.
3 3. UAV-to-VANET collaborationsRecently there is an optimization in FANET network, by using this technique we can make connection from air to the vehicles and we can use this for route guidance, monitoring, and traffic monitoring. Table 6.2shows comprehensive comparison of different adhoc networks.
Table 6.2 Comparison of MANETs, VANETs.
| Criteria | FANET | VANET | MANET |
| Node mobility | High | Medium | Low |
| Mobility model | Pre-determined | Steady | Arbitrary |
| Node density | Low | Medium | Low |
| Topology change | Rapid | Average | Slow |
| Radio propagation model | High above the ground | Close to the ground | Very close to the ground |
| Computational power | Big | Average | Low |
| Localization | GPS, IMU | AGPS, GPS | GPS |
6.2.9 QOS
6.2.9.1 Packet Loss
Packet loss occurs due to many reasons, for example, route loss, congestion, transmission loss, and path missing. It should be minimum for the routing protocol. It is a quality parameter. Formula is presented in (6.1)
(6.1) 
In MANETs, packet loss is important factor of quality of service of MANETs. To calculate it, first, we have to calculate factors that cause packet loss. Main factors are link and transmission loss.
6.2.9.2 Bandwidth
Bandwidth is range of the data packet delivered within the frequency. To calculate the bandwidth, there is hello, listen, and proactive and reactive scheme. For MANETs, bandwidth is of HUNDRED KPS. For VANETs, bandwidth is THOUSAND KPS.
6.2.9.3 Data Rate
Data packet rate for MANETs are 11 Mbps. Data packet rate for VANETs are 27 Mbps.
6.2.9.4 Frequency
In MANETs, frequency we use to deliver the data from one node to other is from 30MHz to 50 GH. For VANETs, we use the frequency for transmission purpose is 75 MHz from 5.85 GHz to 5.926 GHZ.
6.2.9.5 Packet Delivery Ratio (PDR)
It is defined as the ratio of data from receiver to the sender. Formula is presented in (6.2):
(6.2) 
6.2.9.6 Bit Noise Ratio
Bit noise ratio defined as the portion of data delivered to the ratio of data sent. It is high for MANETs, medium for VANETs, and low for FANETs.
6.3 CrANs
Crowd Associated Networks (CrANs) is the network in which we utilize the crowd to complete communication gap between the associates. CrANs is the abbreviation of “crowd associate network”. It consists of five main components which are dedicated agents, non-dedicated agents, control center sink, data storage, and garbage collector. For specific task, dedicated agents are installed into the network. These nodes are static in nature and transfer the information with the same sort of agents. Intermediate nodes are the nodes between source and destination are called crowd nodes. Communication gap is covered by crowd nodes. The nodes send the data from the one to the multiple nodes and copy of the information to the same node. It collects the data from one of the active node and sends the duplicate data packets to the other active nodes present in the zone.
We live in a third world country, and here, due to many reason, we lose the network. In that case, we need a network which can work in that condition. That is the CrANs network is proposed for emergencies and other situations when networks are not functional. It utilizes all other networks to transfer information. For communication, we will combine the CrANs with the MANETs, WANETs, FANETs, and Wi-Fi to transfer the data from one area to other. We will use the presence networks to make a crowd of detective and non-detective nodes for the transfer of data. The non-detective nodes of CrANs connect to the detective nodes of other networks.
6.3.1 Structure of CrANs
The above figure is proposed by the Al-Shakib khan. Figure 6.9shows the way how CrANS works. We used the Edraw Max to draw the CrANs structure, which is shown in the Figure 6.10.
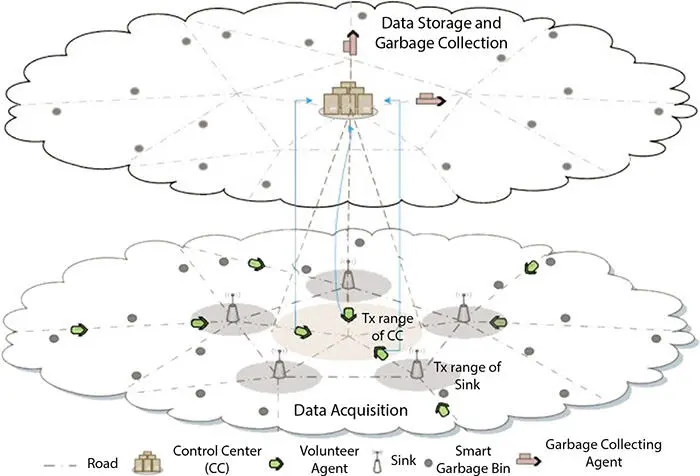
Figure 6.9 Structure of CrANs [27].

Figure 6.10 Proposed structure of CrANS.
It contains all the available networking devices to communicate from one node to other node for delivery of information packets. It contains cellular device, Wi-Fi, MANETs, VANETs, and FANETs in an urban structure.
Why we need it?
We live in a third world country, and here due to many reason we lose the network. In that case, we need a network which can work in that condition.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Handbook of Intelligent Computing and Optimization for Sustainable Development»
Представляем Вашему вниманию похожие книги на «Handbook of Intelligent Computing and Optimization for Sustainable Development» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.







Обсуждение, отзывы о книге «Handbook of Intelligent Computing and Optimization for Sustainable Development» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.