Елена Жидкова - Развитие учетно-аналитической концепции контроллинга. Теория и методология
Здесь есть возможность читать онлайн «Елена Жидкова - Развитие учетно-аналитической концепции контроллинга. Теория и методология» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: М., Год выпуска: 2017, ISBN: 2017, Издательство: Литагент Научная библиотека, Жанр: management, popular_business, Прочая научная литература, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Развитие учетно-аналитической концепции контроллинга. Теория и методология
- Автор:
- Издательство:Литагент Научная библиотека
- Жанр:
- Год:2017
- Город:М.
- ISBN:978-5-9909011-6-2
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Развитие учетно-аналитической концепции контроллинга. Теория и методология: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Развитие учетно-аналитической концепции контроллинга. Теория и методология»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Монография будет полезна научным работникам и преподавателям различных экономических дисциплин, а также аспирантам, магистрантам и студентам соответствующих специальностей. Монография может быть использована менеджерами, специалистами и руководящими работниками, которые стремятся к созданию эффективных систем управления на базе современной концепции контроллинга.
Развитие учетно-аналитической концепции контроллинга. Теория и методология — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Развитие учетно-аналитической концепции контроллинга. Теория и методология», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Появление джокеров в фазовом пространстве динамической системы определяется следующими признаками:
– локальная неустойчивость системы с хаотическим поведением, чередуясь с устойчивым движением, формирует странные аттракторы;
– сильная перемежаемость (когда происходит смена режимов поведения с относительно высокой скоростью);
– влияние внешних шумов в локальных областях;
– высокомодовое движение системы;
– наличие разрывов в отображении;
– быстрые системные изменения, происходящие в объекте, в том числе и критические [230].
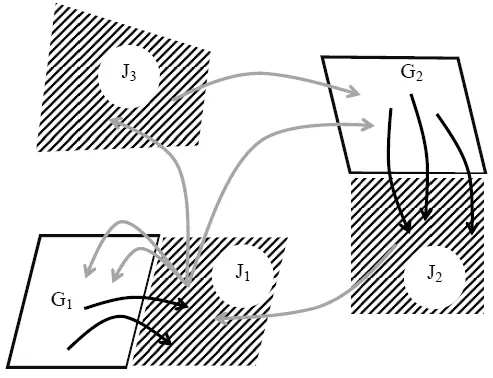
Рис. 19. Схема представления сложной динамики как комбинации русел и джокеров [113, с. 305]
Однако все эти признаки, кроме разрывов в отображении, можно обнаружить только в случае, если возможно использование метода активного пространств возрастающей размерности по данным временного ряда.
Исходя из специфики рассматриваемой задачи, предусматривается использование следующих видов джокеров:
– дискретный точечный джокер, который мгновенно приводит систему в определённую точку фазового пространства. Как правило, это связывается с ситуацией, когда хаос в системе обязательно повлечет за собой ее разрушение;
– двухточечный джокер, который при срабатывании с вероятностью p 1и вероятностью р 2переводит систему в ту или иную точку фазового пространства;
– непрерывный джокер переводит систему в точку некоторой области фазового пространства в соответствии с заданным законом распределения вероятности. Данный тип джокера следует рассматривать как обобщение точечного и двухточечного джокеров;
– мерцающий непрерывный джокер выражается, по сути, непрерывным джокером. Срабатывает он с некоторой, отличной от 1, вероятностью, то есть при попадании изображающей точки в область джокера следующий шаг либо (с вероятностью р 1 и делается в соответствии с уравнением русла, либо (с вероятностью р 2) в соответствии с правилом непрерывного джокера. Этот тип джокеров хорошо подходит для имитации явления перемежаемости;
– мерцающий точечный джокер представляет собой точечный джокер, который срабатывает аналогично мерцающему непрерывному джокеру, в соответствии с вероятностным правилом [26; 112].
Следует отметить, что с позиций динамической теории информации, особого внимания заслуживает промежуток времени непосредственно перед выходом системы из перемешивающего слоя, так как после выхода дальнейшее поведение системы полностью предсказуемо, а сразу после входа – полностью непредсказуемо. Следовательно, отрезок времени перед выходом системы требует формирования качественного интеллектуального продукта для принятия решений.
Процесс бизнес-анализа сочетается с прогнозированием хода различных процессов, скоординированное выполнение которых предполагает достижение бизнес-цели.
Макросистема, оказывающая координирующее и управляющее воздействие на систему нижележащего уровня, позволяющая задать общие пределы движения в терминах смены русел и джокеров, будет находиться в принципиально ином временном масштабе. Пока макросистема находится в русле, задаваемые ею параметры порядка, управляющие состоянием микросистемы, стабильны. Даже если микросистема (отдельный экономический субъект) идентифицирует приближение области джокера, выход из джокера, выбор новой траектории из точки бифуркации, фактически предопределен тем коридором возможностей, который обеспечивает стабильное русло макросистемы, а это означает возможность вероятностного прогнозирования риска для разных сценариев выхода из джокера. Интересы макро– и микроуровней экономической системы имеют различия как в руслах, так и в джокерах.
Одной из задач бизнес-анализа в системе контроллинга наряду с прогнозированием деятельности является ранняя диагностика дестабилизации состояния системы на сигнально-информационной основе с целью избежать попадания в область джокера, а в случае нахождения в ней своевременно отреагировать на кризисную ситуацию. Каждое экономическое событие должно происходить в неком пространстве. Следовательно, в построении модели должно быть определено пространство, на котором задана система, и очень точно оговорены допущения, исходные данные.
При изучении свойств сложных систем в экспериментальных исследованиях широко используется подход, основывающийся на анализе сигналов, произведенных системой. Сигнал представляется временным рядом значений, наблюдаемых в последовательные моменты времени: x(t)≡{x 1, x 2,…,x N }, где t≡{t 1,t 2,…,t N}, x i=x(t i), i =1…N, где N – число отсчетов в сигнале. Сложные сигналы, которые снимаются с большинства реальных систем, обладают следующими характеристиками (одной или несколькими): нестационарны, нерегулярны, функция распределения сигнала отлична от нормального, сингулярны, фрактальны, стохастичны и хаотичны. Решение задач прогнозирования таких сигналов невозможно без реализации в программных комплексах.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Развитие учетно-аналитической концепции контроллинга. Теория и методология»
Представляем Вашему вниманию похожие книги на «Развитие учетно-аналитической концепции контроллинга. Теория и методология» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.







Обсуждение, отзывы о книге «Развитие учетно-аналитической концепции контроллинга. Теория и методология» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.