Джон Ловин - Создаем робота-андроида своими руками
Здесь есть возможность читать онлайн «Джон Ловин - Создаем робота-андроида своими руками» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Москва, Год выпуска: 2007, ISBN: 2007, Издательство: Array Литагент «ДМК», Жанр: Технические науки, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Создаем робота-андроида своими руками
- Автор:
- Издательство:Array Литагент «ДМК»
- Жанр:
- Год:2007
- Город:Москва
- ISBN:5-9706-0032-6
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Создаем робота-андроида своими руками: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Создаем робота-андроида своими руками»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Издание окажется крайне полезным для всех любителей электроники и телемеханики как классическое руководство по функционально-блочному построению робототехнических устройств.
Создаем робота-андроида своими руками — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Создаем робота-андроида своими руками», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Движение робота-рыбы обеспечивается с помощью кольцевого соленоида (см. рис. 13.4). При включении питания верхняя часть соленоида поворачивается на угол примерно 30°. При отключении питания пружина возвращает механизм в исходное положение.

Рис. 13.4. Открытый отсек для размещения электронных компонентов
В верхней части соленоида находятся, по крайней мере, два резьбовых отверстия 1,6 мм, которые могут быть использованы для крепления деталей. В нижней части соленоида имеются две стойки с резьбой 1,6 мм для крепления соленоида. Соленоид оказался не таким мощным, как мне бы хотелось, но его все же достаточно для обеспечения подводного продвижения.
Для генерации медленной последовательности импульсов в схеме использован однопереходный транзистор Q1 (UJT2646) (см. рис. 13.5). Частота импульсов определяется номиналами C1 и R1. Импульсы подаются через резистор R2 на базу Q2. Q2 представляет собой NPN транзистор типа 2N2222. Транзистор Q2 используется для подачи инвертированного импульса на вывод 2 ИС 1. ИС 1 представляет собой таймер 555, включенный по схеме одновибратора. Форма и длина импульса определяются ИС 1. Выход таймера 555 управляет включением транзистора Q3. Транзистор Q3 управляет током, протекающим через кольцевой соленоид, использованный в роботе.
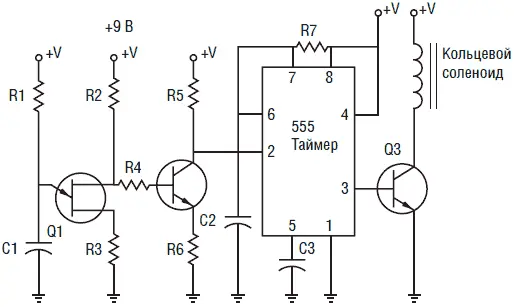
Рис. 13.5. Принципиальная схема устройства
Питание схемы осуществляется с помощью батареи 9 В. Схема достаточно проста и монтируется на печатной плате.
Проверьте работу схемы, соединив ее с соленоидом перед дальнейшей сборкой. Постоянная времени работы соленоида должна быть в районе 1 с.
Для снижения общей массы и веса устройства большинство деталей выполнено из алюминия. Первый вариант механизма, передающего движение соленоида к машущему хвосту «рыбы», изображен на рис. 13.6. Оказалось, что такой механизм сложнее, чем требуется. Окончательный вариант привода хвоста показан на рис. 13.7.
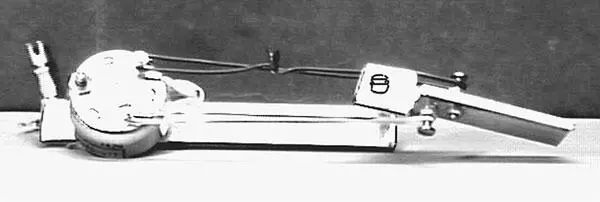
Рис. 13.6. Первоначальный привод движения хвоста
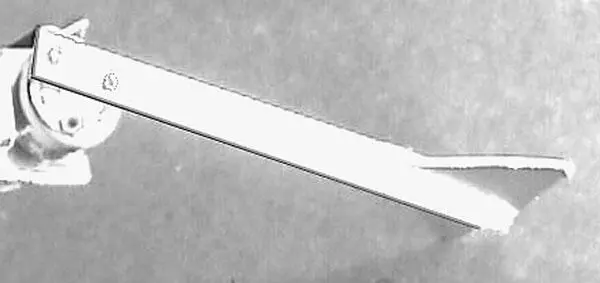
Рис. 13.7. Окончательный вариант привода
Полоса алюминия размерами 3х 12х 140 мм прикреплена к верхней крышке соленоида при помощи двух винтов 1,6 мм и длиной 6 мм. Просверлите сперва два отверстия в алюминиевой полосе, совпадающие с положением отверстий в верхней части соленоида. Затем, чтобы предотвратить излишне глубокое вворачивание винтов в соленоид, предварительно наверните на каждый винт гайку до упора. Если винты слишком глубоко ввернуты в верхнюю подвижную часть соленоида, то они будут препятствовать ее легкому вращению. Прикрепите алюминиевую полосу к подвижной части соленоида.
Плавник хвоста сделан из квадратного кусочка алюминия 30 мм, разрезанного по диагонали. Плавники крепятся к основанию 12 мм с помощью достаточного количества термоклея. Для лучшего контакта можно предварительно зачистить поверхности с помощью наждачной бумаги.
Соленоид крепится к задней части алюминиевой пластины размерами 3x30x50 мм на двух задних стойках 1,6 мм с помощью нескольких гаек. К передней части крепится плата электрической схемы и батарея (см. рис. 13.8).
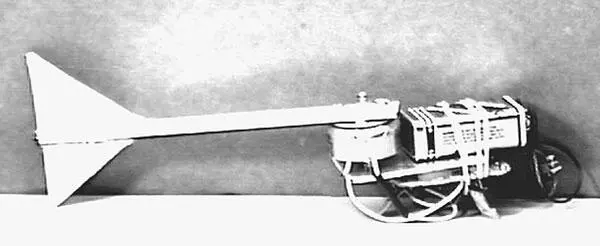
Рис. 13.8. Робот-рыба в сборе
Мы изготовили привод соленоида и электрическую схему. Для исключения попадания воды, которая может привести к порче устройства, необходимо завернуть плату соленоида в тонкую прозрачную пленку, используемую в кулинарии. Чехол из пленки крепится к хвосту с помощью проволоки. Крепление должно обеспечивать легкое поперечное перемещение хвоста.
Перед тем как опускать устройство в воду, ему необходимо обеспечить нулевую плавучесть. Если вы опустите его в воду «как есть», то передняя тяжелая часть робота «спикирует» на дно, а взмахи хвоста будут осуществляться «в воздухе». При помощи резиновой ленты прикрепите полоски пенопласта к передней части модели поверх прозрачного чехла. Положите модель в воду для проверки. Добейтесь горизонтального или почти горизонтального положения равновесия. После этого можно включить модель и отпустить ее в «плавание».
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Создаем робота-андроида своими руками»
Представляем Вашему вниманию похожие книги на «Создаем робота-андроида своими руками» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.





Обсуждение, отзывы о книге «Создаем робота-андроида своими руками» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.