Джон Ловин - Создаем робота-андроида своими руками
Здесь есть возможность читать онлайн «Джон Ловин - Создаем робота-андроида своими руками» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Москва, Год выпуска: 2007, ISBN: 2007, Издательство: Array Литагент «ДМК», Жанр: Технические науки, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Создаем робота-андроида своими руками
- Автор:
- Издательство:Array Литагент «ДМК»
- Жанр:
- Год:2007
- Город:Москва
- ISBN:5-9706-0032-6
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Создаем робота-андроида своими руками: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Создаем робота-андроида своими руками»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Издание окажется крайне полезным для всех любителей электроники и телемеханики как классическое руководство по функционально-блочному построению робототехнических устройств.
Создаем робота-андроида своими руками — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Создаем робота-андроида своими руками», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Плавание с помощью крыла
Хвост рыбы можно рассматривать как подводное крыло. При движении хвоста из стороны в сторону он отбрасывает поток воды назад и соответственно движет рыбу вперед. Во время движения хвоста в воде за ним образуются вихри. Есть основания полагать, что принцип образования этих вихрей может быть ключом к пониманию эффективности передвижения рыбы.
Дельфины интересны тем, что их хвост – подводное крыло расположен горизонтально. Он не перемещается из стороны в сторону как у рыбы, а совершает движения вверх-вниз. Такие движения в той же степени эффективно толкают тело дельфина вперед.
Пингвины плывут с помощью толчков их крыльев. Вид пингвина, плывущего в воде, сильно напоминает полет птицы. Однако существует разница. При полете птица взмахами крыльев должна поддерживать тело в воздухе, а также обеспечивать движение вперед. Создание подъемной силы необходимо для преодоления силы притяжения. Для пингвинов подъемная сила не нужна. Плотность воды равна плотности тела пингвина (нулевая плавучесть), поэтому пингвин машет крыльями только для продвижения вперед.
Лопасти и весла
Рассматривая способы передвижения в воде, мы должны включить сюда использование лопастей и весел. При движении по воде утки используют перепончатые лапы в качестве лопастей. Водомерки используют ножки в качестве весел и двигаются вперед, как маленькие лодки.
Что мы знаем?
Исследования в МТИ привели исследователей к идее использования жидкостного динамического параметра, известного как индекс Строхала. Для рыбы этот параметр вычисляется умножением частоты взмахов хвоста рыбы на ширину образующегося вихря, деленную на скорость рыбы. Были исследованы рыбы разных пород. Оказалось, что КПД у рыбы максимален, когда индекс Строхала лежит в пределах 0,25-0,35.
Когда плавники робота-рыбы, созданной в МТИ были переделаны и настроены так, что индекс Строхала попал в этот диапазон, КПД устройства возрос более чем до 86 %. Это большое достижение по сравнению с гребными винтами, обеспечивающими КПД не более 40 %.
Приступаем к проекту
B этой главе рассмотрены два основных проекта подводных роботов. Один из них предусматривает переделку игрушечной подводной лодки, а другой – изготовление робота-рыбы из подручных материалов.
Подводная лодка
Модели игрушечных подводных лодок производятся и продаются многими компаниями. Их возможности зависят от степени сложности модели, но обычно они управляются по радио и способны погружаться и всплывать (см. рис. 13.2).
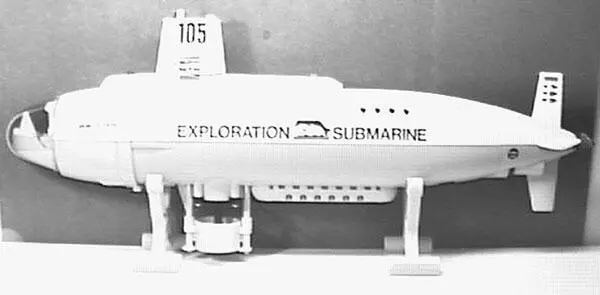
Рис. 13.2. Игрушечная подводная лодка готова к переделке в TROV
При переделке игрушечной подводной лодки я советую отказаться от радиоуправления и перейти к управлению по проводам с использованием соответствующего кабеля. По специальному кабелю можно подвести к подводной лодке питание и управляющие сигналы.
Такие подводные лодки для «хобби» могут быть превращены в небольшие системы телеслежения. Первоначальной переделкой может быть установка цветной видеокамеры. Большинство из подобных лодок имеют пустые отсеки, куда можно установить электронную схему (см. рис. 13.3).

Рис. 13.3. Открытый отсек для размещения электронных компонентов
В подводную лодку можно установить большинство блоков, использованных в автомобиле с дистанционным управлением (см. гл. 9). Единственным отличием является управление по проводам вместо радиоканала.
Подводная лодка является игрушкой, поэтому лучше не запускать ее в открытые водоемы. Крошечные водяные движители в таких лодках могут работать только в спокойной воде. Конечно, создание такой лодки может служить началом для более совершенных конструкций.
Существуют ли какие-либо другие способы использования подобных лодок, кроме использования их в качестве подводных «наблюдателей»? Я могу вообразить себе 10 или более подводных лодок в одном бассейне, причем, каждой управляет отдельный оператор. Я уверен, что на этой базе можно создать множество подводных или «космических» сценариев интересных игр.
Плавание с помощью хвоста
Как уже утверждалось ранее, устройства, имитирующие движения рыб, имеют очень низкий КПД. Эта модель не является исключением. Однако тщательный сбор информации источников типа МТИ может способствовать созданию модели (здесь этого не сделано) с гораздо большим КПД. И если кто-то хочет изготовлять роботов-андроидов, имеющих форму животного, то можно начать именно с этого проекта.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Создаем робота-андроида своими руками»
Представляем Вашему вниманию похожие книги на «Создаем робота-андроида своими руками» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.





Обсуждение, отзывы о книге «Создаем робота-андроида своими руками» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.