В. Яценко - Твой первый квадрокоптер - теория и практика
Здесь есть возможность читать онлайн «В. Яценко - Твой первый квадрокоптер - теория и практика» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Санкт-Петербург, Год выпуска: 2016, ISBN: 2016, Издательство: БХВ-Петербург, Жанр: sci_radio, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Твой первый квадрокоптер: теория и практика
- Автор:
- Издательство:БХВ-Петербург
- Жанр:
- Год:2016
- Город:Санкт-Петербург
- ISBN:978-5-9775-3586-1
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Твой первый квадрокоптер: теория и практика: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Твой первый квадрокоптер: теория и практика»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
. Приведено краткое описание устройства и принципа работы систем GPS и Глонасс, а также современных импульсных источников бортового питания и литий-полимерных батарей. Подробно изложен принцип работы и процесс настройки систем, OSD, телеметрии, беспроводного канала
и популярных навигационных модулей
. Рассказано об устройстве и принципах работы интегральных сенсоров и полетного контроллера.
Даны рекомендации по подбору оборудования FPV начального уровня, приведен обзор программ дня компьютеров и смартфонов, применяемых при настройке оборудования квадрокоптера.
Для читателей, интересующихся электроникой, робототехникой, авиамоделизмом
Твой первый квадрокоптер: теория и практика — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Твой первый квадрокоптер: теория и практика», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
#define LED_FLASHER_SEQUENCE 0b00000000
#define LED_FLASHER_SEQUENCE_ARMED 0b00000101
#define LED_FLASHER_SEQUENCE_MAX 0b11111111
#define LED_FLASHER_SEQUENCE_LOW 0b000000000
В каждой строке присутствует восьмибитное двоичное число. Это последовательность вспышек светодиода. Последовательность циклически повторяется. Ноль соответствует погашенному светодиоду, единица— включенному. Длительность одной вспышки 0,125 с, полный цикл 8∙0,125 = 1 секунда. Например, последовательность 0b00000101 означает, что светодиод дает две короткие вспышки длительностью 0,125 с циклически раз в секунду. Последовательность 0b11111111 соответствует постоянно горящему светодиоду, а 0b000000000 — полностью погашенному. Вы можете задавать произвольную последовательность для любого режима.
Первая строка соответствует режиму DISARMED(питание подано, моторы не активны). По умолчанию подсветка погашена. Изменив последовательность на 0b00000001, можно заставить подсветку вспыхивать раз в секунду, напоминая, что питание подключено. В режиме ARMEDсветодиод по умолчанию вспыхивает дважды.
После активации функции подсветки в панели конфигуратора становятся доступны для настройки еще два параметра, LEDMAXи LEDLOW, которыми можно управлять при помощи переключателей AUX. Разумеется, эти режимы взаимно противоположные и не должны включаться одновременно. Но их можно включать параллельно с другими режимами и задать произвольные последовательности мигания, изменив последовательность двоичных битов.
Посадочные огни предназначены для подсветки посадочной площадки при полетах в темное время суток. Обычно они представляют собой несколько мощных белых светодиодов, направленных вертикально вниз. Схема коммутатора для их включения и порядок расчета режима светодиодов идентичны описанным выше.
По умолчанию в прошивке для управления посадочными огнями назначен вывод 37 в виде контактной площадки на печатной плате. Для удобства подключения коммутатора мы переназначим выход на вывод D9 на штыревой гребенке. Найдите в тексте прошивки строки
//#define LANDING_LIGHTS_DDR DDRC
//#define LANDING_LIGHTS_PORT PORTC
//#define LANDING LIGHTS_BIT PORTC0
Раскомментируйте их и внесите следующие изменения:
#define LANDING_LIGHTS_DDR DDRH
#define LANDING_LIGHTS_PORT FORTH
#define LANDING_LIGHTS_BIT PORTH6
После активации этих строк в интерфейсе конфигуратора MultiWii WinGUI появляется опция LLIGHTS, позволяющая включать посадочные огни любым тумблером AUX. Поскольку каналов AUX мало, можно сделать включение посадочных огней инверсным по отношению к режиму удержания высоты BARO( ALTHOLD). Когда коптер взлетает или садится, режим удержания высоты отключен и горят посадочные огни.
Для подключения выхода приемника S-BUS ко входу RX1 порта SERIAL1 необходимо изготовить простейший инвертор сигнала на одном n-p-n -транзисторе. Это может быть любой маломощный n-p-n -транзистор, например самый распространенный С945 или ВС337. Компоненты схемы (рис. 6.10) можно не монтировать на плате, а спаять детали вывод к выводу и поместить их в термоусадочную трубку. Питание на инвертор подается с разъема приемника или контроллера.
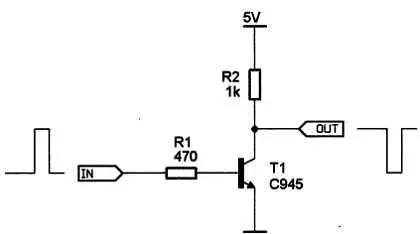
Рис. 6.10. Схема инвертора сигнала для подключения приемника по S-BUS
В файле конфигурации прошивки найдите секцию SBUS RECEIVERи раскомментируйте строки
#define SBUS
#define SBUS_SERIAL_PORT 1
#define SBUS_MID_OFFSET 988
Последняя строка потребуется, если значение среднего положения в сигнале с выхода приемника отличается от стандартного.
К сожалению, поскольку формат сигнала S.BUS Futaba является предметом авторского права, производителям других приемников приходится использовать "футабоподобные" форматы сигнала, которые не полностью соответствуют спецификации Futaba. В прошивку MultiWii 2.3 внесены существенные изменения и дополнения, но по-прежнему нет гарантии, что полетный контроллер сможет декодировать сигнал вашего приемника, если это не приемник Futaba. В крайнем случае, придется прибегнуть к обычному способу подключении.
Новый модуль Bluetooth нужно проверить и настроить до подключения к полетному контроллеру. Несмотря на кажущуюся простоту, настройка часто вызывает затруднения даже у опытных пользователей, поэтому разберем ее подробнее.
Подключите модуль Bluetooth к адаптеру USB-COM. Обратите внимание, что линии данных надо подключать перекрестно: Тх — > Rx, Rx — > Тх. Питание на модуль также подайте с разъема адаптера.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Твой первый квадрокоптер: теория и практика»
Представляем Вашему вниманию похожие книги на «Твой первый квадрокоптер: теория и практика» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.




![Надежда Поврозник - Исторические информационные системы - теория и практика [litres]](/books/429962/nadezhda-povroznik-istoricheskie-informacionnye-sist-thumb.webp)






Обсуждение, отзывы о книге «Твой первый квадрокоптер: теория и практика» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.