В. Яценко - Твой первый квадрокоптер - теория и практика
Здесь есть возможность читать онлайн «В. Яценко - Твой первый квадрокоптер - теория и практика» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Санкт-Петербург, Год выпуска: 2016, ISBN: 2016, Издательство: БХВ-Петербург, Жанр: sci_radio, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Твой первый квадрокоптер: теория и практика
- Автор:
- Издательство:БХВ-Петербург
- Жанр:
- Год:2016
- Город:Санкт-Петербург
- ISBN:978-5-9775-3586-1
- Рейтинг книги:4 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Твой первый квадрокоптер: теория и практика: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Твой первый квадрокоптер: теория и практика»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
. Приведено краткое описание устройства и принципа работы систем GPS и Глонасс, а также современных импульсных источников бортового питания и литий-полимерных батарей. Подробно изложен принцип работы и процесс настройки систем, OSD, телеметрии, беспроводного канала
и популярных навигационных модулей
. Рассказано об устройстве и принципах работы интегральных сенсоров и полетного контроллера.
Даны рекомендации по подбору оборудования FPV начального уровня, приведен обзор программ дня компьютеров и смартфонов, применяемых при настройке оборудования квадрокоптера.
Для читателей, интересующихся электроникой, робототехникой, авиамоделизмом
Твой первый квадрокоптер: теория и практика — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Твой первый квадрокоптер: теория и практика», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
GPS HOLD:режим автоматического удержания позиции по координатам GPS. Для качественного удержания высоты должен быть также включен режим BARO. Если отклонить рукоятку управления от нейтрали, режим удержания временно отключится, и коптер будет реагировать на команды управления. При возврате рукоятки в нейтраль контроллер зафиксирует новую позицию.
Примечание
Режимы GPS HOME и GPS HOLD взаимоисключающие и не должны включаться одновременно.
PASSTHRU:режим сквозного прохождения сигналов радиоуправления с приемника на управляемое устройство. В коптерах не применяется. Может использоваться, например, в самолетах, когда пилот хочет временно отключить стабилизацию и перейти к полностью ручному управлению. При этом стабилизация видеокамеры может продолжать работать.
BEEPER:включение звукового излучателя (beeper, buzzer), подключенного к специальному выходу контроллера. Если в прошивке включено обслуживание звуковых сигналов и активирован режим BEEPER, то контроллер будет реагировать звуком на переключение режимов, а также издавать сигнал "найди меня" при срабатывании функции Failsafe.
LEDMAX:включение подсветки рамы коптера в постоянном режиме. Если используется функция прошивки LED_FLASHER, заставляющая подсветку коптера мигать с заданной частотой, то при активации режима LEDMAXв нее передается максимальное значение OxFF, при котором подсветка горит постоянно. Это необходимо при полетах в ночное время, когда быстро мерцающая подсветка может сильно раздражать зрение.
LEDLOW:принудительное отключение подсветки, когда используется функция прошивки LED_FLASHER. При активации режима LEDLOWв нее передается минимальное значение 0x00, при котором подсветка не горит.
LLIGHTS:включение посадочных огней (Landing Lights) для Подсвечивания посадочной площадки в темное время суток. Посадочные огни также могут включаться автоматически, по показаниям сонара, при достижении заданной высоты. Эта функция включается в настройках прошивки.
CALIB:если в прошивке включена возможность калибровки акселерометра в полете, то по включению режима CALIBво время стабильного горизонтального висения текущее положение запоминается, как нулевое калибровочное положение для акселерометра. В предыдущих версиях прошивки для этого мог использоваться переключатель режима PASSTHRU.
OSD SW:включение/выключение вывода информации OSD в полете, если такая возможность активирована в прошивке. По умолчанию поток данных доступен через последовательный порт всегда.
Эту программу вы скачали в архиве вместе с прошивкой. Для работы приложения потребуется движок Java от Sun Microsystems. Если Java отсутствует на вашем компьютере, при первом запуске вам будет автоматически предложено скачать и установить оболочку Java. Впоследствии Java понадобится и для программы настройки модуля OSD.
Утилита настройки не требует инсталляции. В разархивированной ранее папке выберите нужную версию программы в соответствии с вашей операционной системой. Перед запуском программы контроллер должен быть подключен к компьютеру, иначе нужный СОМ-порт не появится в списке. После запуска выберите нужный порт в списке и нажмите кнопку START. На плате контроллера должны замерцать светодиоды Rx-Tx, а в окне приложения появиться графики потока данных от сенсоров (рис. 5.8).
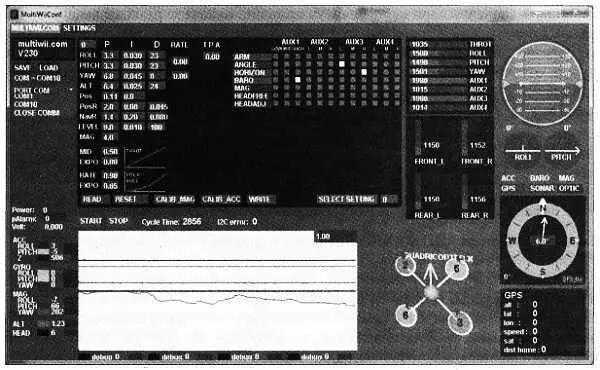
Рис. 5.8. Главное окно интерфейса MultiWiiConf
Калибровка акселерометра
Расположите плату строго горизонтально и нажмите кнопку САLIВ_АСС. Приблизительно в течение 10 с произойдет калибровка акселерометров. В это время плата должна быть неподвижной и не испытывать вибрации. По завершении калибровки светодиоды А и С перестанут мигать непрерывно и будут мигать только при наклоне платы больше 18° от горизонтали, что означает критический нескомпенсированный угол, при котором коптер может начать "соскальзывать", если нет достаточной вертикальной тяги.
Теперь попробуйте наклонять и поворачивать плату. Авиагоризонт и компас в правой части окна должны отображать текущее положение контроллера в пространстве. Расположите плату контроллера стрелкой вперед. При наклоне вправо авиагоризонт должен наклоняться влево, и наоборот. Соответственно, при наклоне вперед уровень горизонта должен подниматься.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Твой первый квадрокоптер: теория и практика»
Представляем Вашему вниманию похожие книги на «Твой первый квадрокоптер: теория и практика» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.




![Надежда Поврозник - Исторические информационные системы - теория и практика [litres]](/books/429962/nadezhda-povroznik-istoricheskie-informacionnye-sist-thumb.webp)






Обсуждение, отзывы о книге «Твой первый квадрокоптер: теория и практика» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.