Вячеслав Иванников - Культурно-историческая психология волевого действия - От прогноза – к поступку
Здесь есть возможность читать онлайн «Вячеслав Иванников - Культурно-историческая психология волевого действия - От прогноза – к поступку» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Москва, Год выпуска: 2021, ISBN: 2021, Жанр: psy_social, psy_alassic, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Культурно-историческая психология волевого действия: От прогноза – к поступку
- Автор:
- Жанр:
- Год:2021
- Город:Москва
- ISBN:978-5-89353-613-3
- Рейтинг книги:3 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Культурно-историческая психология волевого действия: От прогноза – к поступку: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Культурно-историческая психология волевого действия: От прогноза – к поступку»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
В формате PDF A4 сохранен издательский макет.
Культурно-историческая психология волевого действия: От прогноза – к поступку — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Культурно-историческая психология волевого действия: От прогноза – к поступку», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
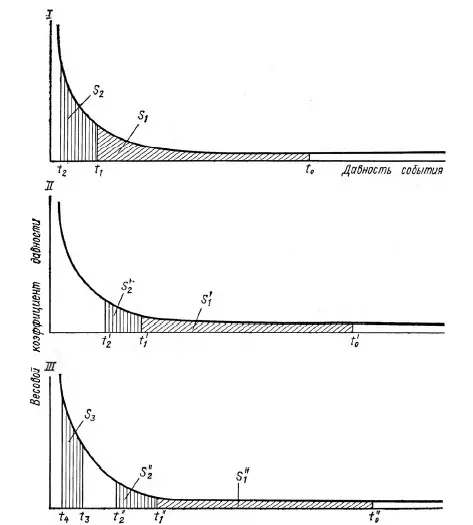
Рис. 1.Весовой коэффициент давности событий.
На оси ординат – весовой коэффициент давности, на оси абсцисс – давность событий: I – кратковременный недавний опыт «перевешивает» более длительный, но давний; II – по прошествии некоторого времени этот «перевес» утрачивается; III – повторное обучение требует меньше времени, чем первоначальное
Наряду с описанными выше ящиками, на передней панели которых записано одно какое-либо событие (ящики первого порядка), заведем в нашей модели еще ящики второго порядка – такие ящики, на передней панели которых записаны два последовательных события: АА, АВ, АС,, BA, ВВ, ВС…, СА, СВ, СС, …. Карточка D, поставленная, например, в ящик АВ, означает, что событие D произошло после события В, перед которым было событие А. В приведенном выше примере карточка D будет частой карточкой в ящике АВ и редкой – в ящике СВ.
Ящики второго порядка, как следует из изложенного, обеспечивают лучшее вероятностное прогнозирование, чем ящики первого порядка. Еще более надежное прогнозирование обеспечивают ящики третьего порядка, на которых записаны три последовательных события: наличие большого числа карточек D в ящике DAB, например, означает, что если после D следовали события А и В, то с высокой вероятностью вновь произойдет событие D.
Ящики второго и более высоких порядков не только обеспечивают лучший прогноз, чем ящики первого порядка, но и дают возможность выработки «ситуационных» условных рефлексов. Представим себе такую ситуацию. Физиологи А и В работают на одних и тех же собаках, но в разное время. Физиолог А подкрепляет звонок С пищей D. Физиолог В – легким уколом лапы Е. В первом случае у собаки возникает пищевая реакция, во втором – оборонительная. Если звонка нет, собака не реагирует пищевой или оборонительной реакцией на вид физиологов А и В. На звонок же она после выработки условных рефлексов реагирует по-разному. Если перед звонком С она видела физиолога А, то она, не дожидаясь подкрепления D, отвечает пищевой реакцией. Если перед звонком С она видела физиолога В, то, не дожидаясь подкрепления Е, реагирует отдергиванием лапы. В модели это обеспечивается тем, что карточки D (пища) попадают в ящик АС, а карточки Е (укол) – в ящик ВС. Поэтому при возникновении комплекса событий А и С прогнозируется высокая вероятность возникновения события D; если эта вероятность P(D/AC ) близка к единице, то наблюдается пищевая реакция. При возникновении же комплекса событий В и С прогнозируется высокая вероятность возникновения события Е; если Р(Е/ВС) выше некоторого «порогового» уровня, наступает оборонительная реакция.
Наличие в модели ящиков высоких (второго и выше) порядков позволяет моделировать не только классические условные рефлексы, описанные И. П. Павловым, но и условные рефлексы, названные Ю. Конорским условными рефлексами второго типа (в отличие от классических – условных рефлексов первого типа). Условные рефлексы второго типа известны в литературе и под другими названиями – инструментальных условных реакций или оперантного поведения.
В чем же различие между условными рефлексами первого и второго типа?
Общая схема условного рефлекса первого типа может быть записана символически следующим образом. Исходное состояние системы таково, что стимул SA вызывает реакцию R A(S A→R A). Другой стимул S B реакции R A не вызывает. Если же вслед за стимулом S B следует стимул S A, то реакция R A возникает (S BS A®R A). В этом случае принято говорить, что условный раздражитель S B «подкрепляется» безусловным раздражителем S A. Если теперь такое совместное действие стимулов S B и S A повторяется достаточное число (n) раз, то уже одного стимула S B оказывается достаточно, чтобы вызвать реакцию R A. Коротко это будет выглядеть так:
S A вызывает R A
S B не вызывает R A
SBSA вызывает RA
………….
…………. n раз
………….
S B вызывает R A.
Для характеристики условного рефлекса второго типа опишем один из экспериментов Конорского. Собаку оставляли в пустом помещении. Время от времени собака без видимой причины лаяла. Каждые несколько минут раздавался стук метронома, и если собака в этот момент лаяла, то из пищевого контейнера падал кусочек мяса. Вскоре собака стала лаять в экспериментальной обстановке постоянно. Но лай «подкреплялся» мясом только тогда, когда стучал метроном. В результате собака начинала лаять именно тогда, когда стучал метроном. Именно так осуществляется дрессировка животных, когда животное учат в ответ на определенный сигнал выполнять определенное действие.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Культурно-историческая психология волевого действия: От прогноза – к поступку»
Представляем Вашему вниманию похожие книги на «Культурно-историческая психология волевого действия: От прогноза – к поступку» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.









Обсуждение, отзывы о книге «Культурно-историческая психология волевого действия: От прогноза – к поступку» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.