Т.Ю.Кущ, М.С.ВоловникАнглийский язык для судовых электромехаников. ENGLISH FOR MARINE ELECTRICAL ENGINEERS. 1986
Здесь есть возможность читать онлайн «Т.Ю.Кущ, М.С.ВоловникАнглийский язык для судовых электромехаников. ENGLISH FOR MARINE ELECTRICAL ENGINEERS. 1986» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: Прочая научная литература, на английском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.

- Название:Т.Ю.Кущ, М.С.ВоловникАнглийский язык для судовых электромехаников. ENGLISH FOR MARINE ELECTRICAL ENGINEERS. 1986
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Т.Ю.Кущ, М.С.ВоловникАнглийский язык для судовых электромехаников. ENGLISH FOR MARINE ELECTRICAL ENGINEERS. 1986: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Т.Ю.Кущ, М.С.ВоловникАнглийский язык для судовых электромехаников. ENGLISH FOR MARINE ELECTRICAL ENGINEERS. 1986»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Т.Ю.Кущ, М.С.ВоловникАнглийский язык для судовых электромехаников. ENGLISH FOR MARINE ELECTRICAL ENGINEERS. 1986 — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Т.Ю.Кущ, М.С.ВоловникАнглийский язык для судовых электромехаников. ENGLISH FOR MARINE ELECTRICAL ENGINEERS. 1986», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
thrust bearing, journal bearing, stern tube bearing, crosshead bearing, and big end bearing high temperatures;
cylinder average high temperature, piston cooling fluid low flow rate;
engine luboil high temperature;
fuel injectors cooling fluid flow failure.
If any of the above variables, in particular bearing temperature and luboil pressure, reach exceptionally critical values, RPM reduction is converted to an engine lockout.
Emergency
Shield push-buttons are provided both on Bridge and ECR. By means of these push-buttons some safety and protection facilities may be excluded (RPM reduction, torque limitation, acceleration gradient, engine power manual limitation).
If a “crash stop” is affected in this condition, the admission of starting air takes place at a number of RPM’s higher than required for normal reversal and the RPM set-point, as well as positioning limit of the fuel oil lever are automatically brought to a third emergency level.
If said emergency starting RPM’s are not reached within a certain limit, the air valves close and a starting failure alarm is displayed.
To repeat the “crash, stop” operation, the operator must reset the engine telegraph on STOP position and then set the desired number of RPM’s.
C
Digital Computer Integrated Automation Systems Digital Computer Applications
Automation and control systems can be conveniently integrated with minicomputer digital processors. Interface units apt to handle all inputs and outputs problems from the process to the computer (Fig. 9) are available, depending on the type of solution contemplated.
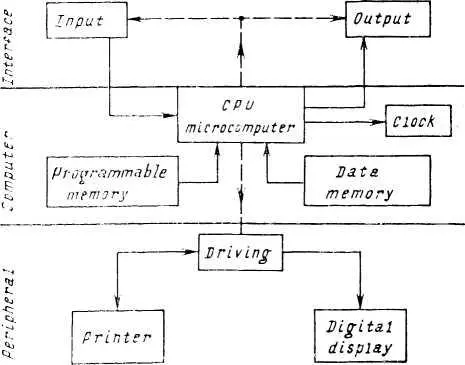 |
| Fig. 9, Process of the computer |
There are such applications of minicomputers as:
Supervision of plant operating data with alarm recording, data logging and process monitoring of the process.
On demand digital display of plant variables.
Event recording: print out of the various plant variables on occurrence of an event, with the chronological history of groups of events in their exact sequence.
Recording of the value of the various plant variables in the time intervals preceeding the occurrence of a fault condition.
Trend recording: recording of the tendency of a variable to exceed set-point value over a short and medium term.
Recording of the maximum off-normal drift of a variable from threshold value.
Sequence control: for groups of variables.
Optimization of complex automation systems with set-point value correction by the computer.
Plant efficiency and performance calculations.
Operator guide: processing of the data collected by comparison with the optimum memorized operating program in order to furnish guidance to the operator.
Information storage: collection of data relating to plant operation. Formulation of consents and locks based on complex programs including non-linear functions of plant parameters.
Data communication: local processing of the variables by the peripheral microcomputers with data transmission to the centra! microcomputer. Microcomputer. The microcomputer is a control unit with extremely flexible program; modern electronic technology lias made this facility available for application in the solution of control problems which heretofore had to be handled by wired logic or relay logic.
Easily expandable high speed programs include complex arithmetic and logic operations.
The microcomputer itself comes as a conventional electronic unit mounted on standard racks apt to contain several plug-in type modules. The following modules are fitted in the standard rack:
1. Central Processor Unit (CPU).
CPU performs arithmetical and logical calculations at high speed with 8 bit words: it performs all the processing functions and is capable of addressing itself up to 64 memory bits.
2. Electronic type programmable memory (PROM) or fixed memory (ROM).
3. Memory module for electronic type data.
4. Input module connecting the CPU with the process.
5. Output module, to dispatch the microcomputer information toward the process.
6. Interface module, to adapt the input signals and input/output card capacity to the multiplexing and demultiplexing units and for A/D to D/A conversion.
D
Computer Hardware
The heart of the system is the Central Processing Unit (CPU), which holds both program and data, an Arithmetic-Logic Unit (ALU), which contains processing circuitry such as an adder, shifter, and a few fast registers for holding the operands*, and the instruction currently being processed (Fig. 10). The program counter would also be included in the ALU. One part of the CPU is a set of routing circuits which provide path between storage and the ALU and input/output controllers or channels. Many storage or input devices may be wired to one channel; but only
one device per channel can be transmitting information from or to main storage at any one time.
Main
storage
:r
| Dr-inte r
ХГ -
LSra reader and сага punch
tout: "g circui ts
display and Any boa rd
c ha nr els
A ri thmct l c logic uni t
у board ' л ey ica -d
Г"
Pish si maps 'j Magnet is taps
Fig. 10. General organization of a computer system
In general, large computers may be thought of as having four distinct parts: a high-speed calculating unit, a memory unit, an input device and an output device.
* исходное число.
E
Main Engine Control System for Internal Combustion Marine Diesel Engines'
Main engine control system is used for automatic remote control and protection of main ship’s diesels. It permits to change direction and speed rotation of propeller directly from the bridge by navigators. The system consists of the equipment installed on the bridge, engine control room (ECR) locally mounted near the engine.
The set of Engine Remote Control equipment 2in ECR essentially consists of a panel fitted up 3with the various signalling, alarm and control facilities 4, in addition to the electronic modules (both logic and analog).
Electronic Control Modules Rack 5comprises:
a) Engine starting and reversal logic module 6, with LED display 7(direction of rotation indicator) 6of logic status 9and starting set-point adjust potentiometer status 10;
b) Digital/analog engine RPM converter" with cut-in thresholds 12and LED display of the status of the thresholds and thresholds adjusting potentiometers 13.
c) Engine control programmer 14with LED display of stand-by 15, RPM reduction, emergency, etc. and acceleration gradient adjusting potentiometer 10.
d) RPM controller 17with potentiometers for variables and operating limits adjustment 13.
e) Torque limiter 19, with limit indicator 20.
Locally Mounted Equipment comprises electro-hydraulic type actuator 21, for remote control of the fuel linkages 22; the said actuator is continuously linked mechanically to the lever and is therefore driven by the manual handwheel 23when it is deenergized 24.
The equipment also comprises induction type pick-ups 23to monitor 26the number of RPM’s- 7and rotating direction, as well as u five-position servo-motor 23, complete with four devices to position the engine local control lever 2-' for reversing gears and starting air distributors for engine stop, running ahead 30, starting ahead, running astern, starting astern. Equipment on Bridge comprises:
1. Engine telegraph.
2. Automatic control panel. It has the following items 31mounted on panel front 32:
a) Manual power limiter 33.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Т.Ю.Кущ, М.С.ВоловникАнглийский язык для судовых электромехаников. ENGLISH FOR MARINE ELECTRICAL ENGINEERS. 1986»
Представляем Вашему вниманию похожие книги на «Т.Ю.Кущ, М.С.ВоловникАнглийский язык для судовых электромехаников. ENGLISH FOR MARINE ELECTRICAL ENGINEERS. 1986» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.








Обсуждение, отзывы о книге «Т.Ю.Кущ, М.С.ВоловникАнглийский язык для судовых электромехаников. ENGLISH FOR MARINE ELECTRICAL ENGINEERS. 1986» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.