Владимир Арнольд - Теория катастроф
Здесь есть возможность читать онлайн «Владимир Арнольд - Теория катастроф» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Год выпуска: 1990, Жанр: Математика, sci_popular, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Теория катастроф
- Автор:
- Жанр:
- Год:1990
- ISBN:нет данных
- Рейтинг книги:3.5 / 5. Голосов: 2
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Теория катастроф: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Теория катастроф»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Теория катастроф — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Теория катастроф», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
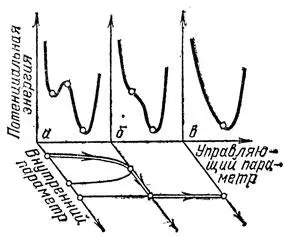
Рис. 8. Потенциальная энергия машины катастроф
Рассмотрим трехмерное пространство состояний машины. Состояния, при которых диск находится в равновесии, образуют в этом пространстве гладкую поверхность. Будем проектировать эту поверхность на плоскость управляющих параметров вдоль оси внутреннего параметра (рис. 9). Это проектирование имеет складки и сборки. Проекция точек складок и есть кривая катастроф. На рис. 9 ясно видно, почему переход управляющих параметров через линию катастроф иногда вызывает, а иногда не вызывает скачок (это зависит от того, какой части нашей поверхности отвечает положение диска). Пользуясь этим рисунком, можно переходить с одного места поверхности равновесий на другое без скачков.
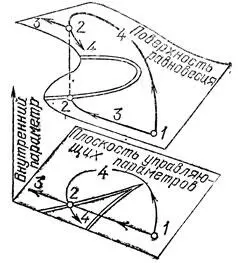
Рис. 9. Поверхность равновесий машины катастроф
Схема большинства применений теории катастроф такая же, как в описанных примерах. Предполагается, что изучаемый процесс описывается при помощи некоторого числа управляющих и внутренних параметров. Состояния равновесия процесса образуют поверхность того или иного числа измерений в этом пространстве. Проекция поверхности равновесий на плоскость управляющих параметров может иметь особенности. Предполагается, что это — особенности общего положения. В таком случае теория особенностей предсказывает геометрию "катастроф", т. е. перескоков из одного состояния равновесия в другое при изменении управляющих параметров. В большинстве серьезных приложений особенность — это сборка Уитни, а результат был известен до провозглашения теории катастроф.
Приложения описанного типа бывают более или менее обоснованными в зависимости от степени обоснованности исходных посылок. Например, в теории хлопков упругих конструкций и в теории опрокидывания кораблей предсказания теории полностью подтверждаются экспериментом. С другой стороны, в биологии, психологии и социальных науках (скажем, в приложениях к теории поведения биржевых игроков или к изучению нервных болезней) как исходные предпосылки, так и выводы имеют скорее эвристическое значение.
5. Бифуркации положений равновесия
Эволюционный процесс математически описывается векторным полем в фазовом пространстве. Точка фазового пространства задает состояние системы. Приложенный в этой точке вектор указывает скорость изменения состояния.
В некоторых точках вектор может обращаться в нуль. Такие точки называются положениями равновесия (состояние не меняется с течением времени). На рис. 10 изображено фазовое пространство системы, описывающей взаимоотношение хищника и жертвы (скажем, щук и карасей). Фазовое пространство — положительный квадрант плоскости. По оси абсцисс отложено число карасей, по оси ординат — щук. Точка Р — положение равновесия. Точка А соответствует равновесному количеству карасей при количестве щук, меньшем равновесного. Видно, что с течением времени в системе устанавливаются колебания; равновесное состояние рис. 10 неустойчиво . Установившиеся колебания изображаются замкнутой кривой на фазовой плоскости. Эта кривая называется предельным циклом .
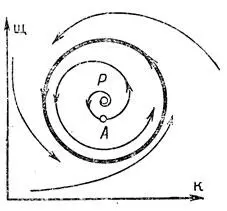
Рис. 10. Фазовая плоскость модели хищник — жертва
Кривые в фазовом пространстве, образованные последовательными состояниями процесса, называются фазовыми кривыми . В окрестности точки, не являющейся положением равновесия, разбиение фазового пространства на фазовые кривые устроено так же, как разбиение на параллельные прямые: семейство фазовых кривых можно превратить в семейство параллельных прямых гладкой заменой координат. В окрестности положения равновесия картина сложнее. Как показал еще А. Пуанкаре, поведение фазовых кривых в окрестности положения равновесия на фазовой плоскости в системе общего положения такое, как изображено на рис. 11. Все более сложные случаи превращаются в указанные при общем малом изменении системы.
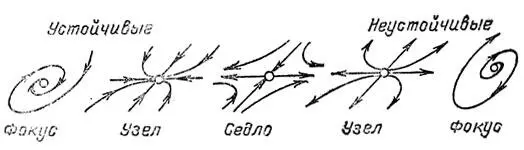
Рис. 11. Типичные фазовые портреты в окрестности точки равновесия
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Теория катастроф»
Представляем Вашему вниманию похожие книги на «Теория катастроф» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.


Обсуждение, отзывы о книге «Теория катастроф» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.