Владимир Дьяконов - Maple 9.5/10 в математике, физике и образовании
Здесь есть возможность читать онлайн «Владимир Дьяконов - Maple 9.5/10 в математике, физике и образовании» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Москва, Год выпуска: 2006, ISBN: 2006, Издательство: СОЛОН-Пресс, Жанр: Программы, Математика, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Maple 9.5/10 в математике, физике и образовании
- Автор:
- Издательство:СОЛОН-Пресс
- Жанр:
- Год:2006
- Город:Москва
- ISBN:5-98003-258-4
- Рейтинг книги:5 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Maple 9.5/10 в математике, физике и образовании: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Maple 9.5/10 в математике, физике и образовании»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Maple 9.5/10 в математике, физике и образовании — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Maple 9.5/10 в математике, физике и образовании», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
t*diff(f(x,y,z,t), t) + f(x,y,z,t) = 0,
-x*diff(f(x, y, z, t), y) - diff(f(x,y,z,t),z)=0]:
for _eq in myPDEsystem do
_eq;
od;
> sol := pdsolve(myPDEsystem);

Обратите внимание на то, что в последнем примере из справки решена система дифференциальных уравнений в частных производных.
7.8.4. Функция PDEplot пакета DEtools
Одна из важнейших функций пакета DEtools — DEtools[PDEplot] — служит для построения графиков решения систем с квазилинейными дифференциальными уравнениями первого порядка в частных производных. Эта функция используется в следующем виде:
PCEplot(pdiffeq, var, i_curve, srange, o)
PDEplot(pdrffeq, var, i_curve, srange, xrange, yrange, urange, o)
Здесь помимо упоминавшихся ранее параметров используются следующие: pdiffeq — квазилинейные дифференциальные уравнения первого порядка (PDE), vars — независимая переменная и i_curve — начальные условия для параметрических кривых трехмерной поверхности. Помимо опций, указанных для функции DEplot, здесь могут использоваться следующие опции:
• animate = true, false — включение (true) или выключение (false) режима анимации графиков;
• basechar = true, false, ONLY — устанавливает показ начального условия на плоскости (х,у);
• basecolor = b_color — устанавливает цвет базовых характеристик;
• ic_assumptions — задание (в виде равенств или неравенств) ограничений на начальные условия для первых производных;
• initcolor = i_color — инициализация цвета кривой начальных условий;
• numchar = integer — залает число отрезков кривых, которое не должно быть меньше 4 (по умолчанию 20);
• numsteps = [integer1, integer2] — задает число шагов интегрирования (по умолчанию [10,10]);
• obsrange = true, false — прекращение интегрирования (true) при выходе отображаемой переменной за заданные пределы или продолжение интегрирования (false) в любом случае;
• scene=[x,y,u(x,y)] — вывод обозначений координатных осей.
С помощью параметров и опций можно задать множество возможностей для наглядной визуализации довольно сложных решений систем дифференциальных уравнений с частными производными. Следует отметить, что неправильное задание параметров ведет просто к выводу функции в строке вывода без построения графиков и нередко без сообщений об ошибках. Поэтому полезно внимательно просмотреть примеры применения этой функции — как приведенные ниже, так и в справке.
7.8.5. Примеры применения функции PDEplot
Рисунок 7.28 демонстрирует применение функции PDEplot. Этот пример из справки показывает, насколько необычным может быть решение даже простой системы дифференциальных уравнений в частных производных.
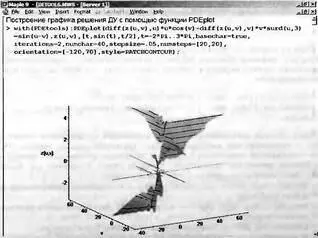
Рис. 7 28. Пример применения функции PDEplot
В данном случае решение представлено трехмерной фигурой весьма нерегулярного вида.
Другой пример использования функции PDEplot показан на рис. 7.29. Он иллюстрирует комбинированное построение графиков решения разного типа с применением функциональной закраски, реализуемой по заданной формуле с помощью опции initcolor.
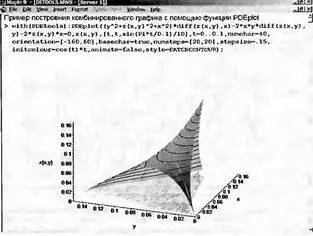
Рис. 7.29. Построение комбинированного графика с помощью функции PDEplot
Еще раз отметим, что, к сожалению, рисунки в данной книге не дают представления о цвете выводимых системой Maple графиков. Поэтому наглядность решений, видимых на экране монитора, существенно выше.
7.9. Сложные колебания в нелинейных системах и средах
7.9.1. Пример нелинейной системы и моделирование колебаний в ней
Многие системы (например, нелинейные оптические резонаторы, лазерные устройства и др.) описываются системами из более чем двух нелинейных дифференциальных уравнений. Колебания в таких системах нередко носят сложный нестационарный, а порою даже хаотический характер. Примером этого может служить анализ переходных процессов в системе, описываемой тремя дифференциальными уравнениями и представленной на рис. 7.30.
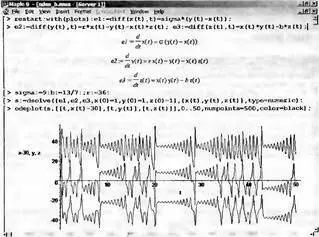
Рис. 7.30. Пример решения системы из трех нелинейных дифференциальных уравнений, создающей колебания сложной формы
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Maple 9.5/10 в математике, физике и образовании»
Представляем Вашему вниманию похожие книги на «Maple 9.5/10 в математике, физике и образовании» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.




Обсуждение, отзывы о книге «Maple 9.5/10 в математике, физике и образовании» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.