Иван Братко - Программирование на языке Пролог для искусственного интеллекта
Здесь есть возможность читать онлайн «Иван Братко - Программирование на языке Пролог для искусственного интеллекта» весь текст электронной книги совершенно бесплатно (целиком полную версию без сокращений). В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Город: Москва, Год выпуска: 1990, ISBN: 1990, Издательство: Мир, Жанр: Программирование, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Программирование на языке Пролог для искусственного интеллекта
- Автор:
- Издательство:Мир
- Жанр:
- Год:1990
- Город:Москва
- ISBN:5-03-001425-Х
- Рейтинг книги:2.5 / 5. Голосов: 2
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Программирование на языке Пролог для искусственного интеллекта: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Программирование на языке Пролог для искусственного интеллекта»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Для программистов разной квалификации, специалистов по искусственному интеллекту, для всех изучающих программирование.
Программирование на языке Пролог для искусственного интеллекта — читать онлайн бесплатно полную книгу (весь текст) целиком
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Программирование на языке Пролог для искусственного интеллекта», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
Решение= неконкретизировано.
(3) ЕстьРеш = никогда
Дер1и Решение= неконкретизированы.
В последнем случае Дерявляется "тупиковой" альтернативой, и соответствующий процесс никогда не будет реактивирован для продолжения просмотра этого дерева. Случай этот возникает тогда, когда f -оценка дерева Дерне превосходит ограничения Предел, однако дерево не может "расти" потому, что ни один его лист не имеет преемников, или же любой преемник порождает цикл.
Некоторые предложения процедуры расширитьтребуют пояснений. Предложение, относящееся к наиболее сложному случаю, когда Деримеет поддеревья, т.е.
Дер = д( В, F/G, [Д | ДД ] )
означает следующее. Во-первых, расширению подвергается наиболее перспективное дерево Д. В качестве ограничения этому дереву выдается не Предел, а некоторое, возможно, меньшее значение Предел1, зависящее от f -оценок других конкурирующих поддеревьев ДД. Тем самым гарантируется, что "растущее" дерево — это всегда наиболее перспективное дерево, а переключение активности между поддеревьями происходит в соответствии с их f -оценками. После того, как самый перспективный кандидат расширен, вспомогательная процедура продолжитьрешает, что делать дальше, а это зависит от типа результата, полученного после расширения. Если найдено решение, то оно и выдается, в противном случае процесс расширения деревьев продолжается.
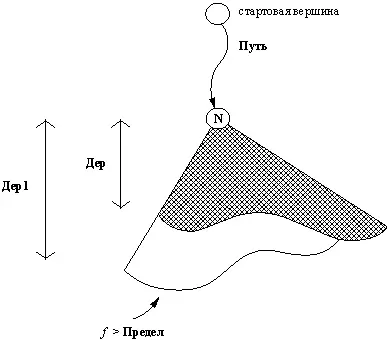
Рис. 12.4. Отношение расширить: расширение дерева Дердо тех пор, пока f -оценка не превзойдет Предел, приводит к дереву Дер1.
Предложение, относящееся к случаю
Дер = л( В, F/G)
порождает всех преемников вершины Ввместе со стоимостями дуг, ведущих в них из В. Процедура преемсписформирует список поддеревьев, соответствующих вершинам-преемникам, а также вычисляет их g- и f- оценки, как показано на рис. 12.5. Затем полученное таким образом дерево подвергается расширению с учетом ограничения Предел. Если преемников нет, то переменной ЕстьРешпридается значение "никогда" и в результате лист Впокидается навсегда.
Другие отношения:
после( В, В1, С) |
В1 — преемник вершины В; С — стоимость дуги, ведущей из В в В1. |
h( В, H) |
H — эвристическая оценка стоимости оптимального пути из вершины В в целевую вершину. |
макс_f( Fмакс) |
Fмакс — некоторое значение, задаваемое пользователем, про которое известно, что оно больше любой возможной f -оценки. |
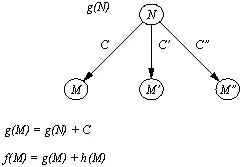
Рис. 12.5. Связь между g- оценкой вершины В и f- и g- оценками ее "детей" в пространстве состояний.
В следующих разделах мы покажем на примерах, как можно применить нашу программу поиска с предпочтением к конкретным задачам. А сейчас сделаем несколько заключительных замечаний общего характера относительно этой программы. Мы реализовали один из вариантов эвристического алгоритма, известного в литературе как А*-алгоритм (ссылки на литературу см. в конце главы). А*-алгоритм привлек внимание многих исследователей. Здесь мы приведем один важный результат, полученный в результате математического анализа А*-алгоритма:
Алгоритм поиска пути называют допустимым , если он всегда отыскивает оптимальное решение (т.е. путь минимальной стоимости) при условии, что такой путь существует. Наша реализация алгоритма поиска, пользуясь механизмом возвратов, выдает все существующие решения, поэтому, в нашем случае, условием допустимости следует считать оптимальность первого из найденных решений. Обозначим через h*(n) стоимость оптимального пути из произвольной вершины n в целевую вершину. Верна следующая теорема о допустимости А*-алгоритма: А*-алгоритм, использующий эвристическую функцию h , является допустимым, если
h ( n ) ≤ h *( n )
для всех вершин n пространства состояний.
Этот результат имеет огромное практическое значение. Даже если нам не известно точное значение h *, нам достаточно найти какую-либо нижнюю грань h * и использовать ее в качестве h в А*-алгоритме — оптимальность решения будет гарантирована.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Программирование на языке Пролог для искусственного интеллекта»
Представляем Вашему вниманию похожие книги на «Программирование на языке Пролог для искусственного интеллекта» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.






Обсуждение, отзывы о книге «Программирование на языке Пролог для искусственного интеллекта» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.