Михаил Краснов - Графика DirectX в Delphi
Здесь есть возможность читать онлайн «Михаил Краснов - Графика DirectX в Delphi» — ознакомительный отрывок электронной книги совершенно бесплатно, а после прочтения отрывка купить полную версию. В некоторых случаях можно слушать аудио, скачать через торрент в формате fb2 и присутствует краткое содержание. Жанр: Программирование, на русском языке. Описание произведения, (предисловие) а так же отзывы посетителей доступны на портале библиотеки ЛибКат.
- Название:Графика DirectX в Delphi
- Автор:
- Жанр:
- Год:неизвестен
- ISBN:нет данных
- Рейтинг книги:3 / 5. Голосов: 1
-
Избранное:Добавить в избранное
- Отзывы:
-
Ваша оценка:
Графика DirectX в Delphi: краткое содержание, описание и аннотация
Предлагаем к чтению аннотацию, описание, краткое содержание или предисловие (зависит от того, что написал сам автор книги «Графика DirectX в Delphi»). Если вы не нашли необходимую информацию о книге — напишите в комментариях, мы постараемся отыскать её.
Графика DirectX в Delphi — читать онлайн ознакомительный отрывок
Ниже представлен текст книги, разбитый по страницам. Система сохранения места последней прочитанной страницы, позволяет с удобством читать онлайн бесплатно книгу «Графика DirectX в Delphi», без необходимости каждый раз заново искать на чём Вы остановились. Поставьте закладку, и сможете в любой момент перейти на страницу, на которой закончили чтение.
Интервал:
Закладка:
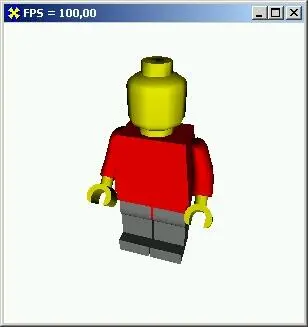
Подходящую модель я нашел по Internet-адресу http://www.people.zeelandnet.nl /nihil/download/legoman.zip. Автор модели, Kortekaas, любезно предоставил разрешение на использование ее в этой книге.
Эта модель также конвертирована мною с помощью программы импорта 3D Exploration, а код был преобразован из программы на языке C++. При импортировании комплексных моделей, состоящих, как в данном примере, из нескольких частей, в код вставляются метки-имена составляющих элементов. По этим меткам можно ориентироваться для получения данных о том, сколько треугольников потрачено на описание отдельной части, чтобы идентифицировать каждый элемент:
procedure TfrmD3D.DrawScene;
begin
with FD3DDevice do begin
// Ноги покрашены материалом серого цвета
SetMaterial(MaterialGray);
SetTransform(D3DTS_WORLD, matLeftFoot);
// Левая нога
DrawPrimitive(D3DPT_TRIANGLELIST, 0, 112);
// Правая нога
SetTransform(D3DTS_WORLD, matRightFoot) ;
DrawPrimitive(D3DPT TRIANGLELIST, (112 + 204) * 3, 112);
// Руки покрашены красным цветом SetMaterial(MaterialRed) ; // Левая рука
SetTransform(D3DTS_WORLD, matLeftHand);
DrawPrimitive(D3DPT_TRIANGLELIST, (112+204 + 112 + 620 + 6141*3, 612); // Кисти - желтого цвета
SetMaterial(MaterialYellow) ; // Левая кисть
DrawPrimitive(D3DPT_TRIANGLELIST,(112+204+112+620+614+612)*3, 324);
SetMaterial(MaterialRed); SetTransform(D3DTS_WORLD, matRightHand); // Правая рука
DrawPrimitive(D3DPTJTRIANGLELIST, (112 + 204 + 112 + 620) * 3, 614); // Правая кисть
SetMaterial(MaterialYellow) ;
DrawPrimitive(D3DPT_TRIANGLELIST,
(112+204+112+620+614+612+324)*3, 324); // Голова
S.etTransform(D3DTS_WORLD, matRot) ;
DrawPrimitive(D3DPTJTRIANGLELIST, (112 + 204 + 112) * 3, 620); // Туловище, красного цвета
SetMaterial(MaterialRed) ;
DrawPrimitive(D3DPTJTRIANGLELIST, 112 * 3, 204);
end;
end;
Буфер вершин заполняется данными на всю модель целиком, а при воспроизведении отдельных частей из него последовательно выбираются соответствующие треугольники. Перед воспроизведением каждого элемента устанавливается предварительно рассчитанная матрица трансформаций, поэтому изначально монолитная модель пришла в движение. Для каждого элемента модели задается индивидуальный материал, поэтому модель стала разноцветной. Фигурирующие числа получены следующим образом: я подсчитал количество отдельных фасетов между метками, расставленными программой моделирования трехмерных объектов в описании массива face^indicies.
Матрицы, связанные с поворотом конечностей, из соображений оптимизации вычисляются не при каждой перерисовке кадра, а только при изменении значений управляющих переменных. Обратите внимание, что поворот конечностей в точках крепления осуществляется следующим образом: система координат перемещается в точку крепления, выполняется поворот, а затем система координат возвращается в первоначальное положение:
procedure TfrmDSD.MoveMan;
begin
// Поворот глобальной системы координат,
// вращение всей модели вокруг своей оси
SetRotateZMatrix (matRot, Angle);
// Переменная, задающая вращение конечностей
AngleFoot := AngleFoot + StepFoot;
if (AngleFoot > Pi / 4) or (AngleFoot < -Pi / 4}
then StepFoot := -StepFoot; // Ноги вращаются в противофазе
SetRotateXMatrix (rotLeftFoot, AngleFoot);
SetRotateXMatrix (rotRightFoot, -AngleFoot); // Поворот левой ноги, в три этапа
matLeftFoot := MatrixMul(matRot,
MatrixMul(transFoot2, MatrixMul(rotLeftFoot, transFootl))); // Поворот правой ноги
matRightFoot := MatrixMul(matRot,
MatrixMul(transFoot2,
MatrixMul(rotRightFoot, transFootl))); // Поворот левой руки
matLeftHand := MatrixMul(matRot,
MatrixMul(transHand2,
MatrixMul(rotRightFoot, transHandl))); // Поворот правой руки
matRightHand := MatrixMul(matRot,
MatrixMul(transHand2, MatrixMul(rotLeftFoot, transHandl)));
end;
Рабочие матрицы, связанные с перемещениями в точки крепления конечностей, инициализируются один раз, в начале работы приложения:
SetTranslateMatrix(transFootl, О, О, 0.25);
SetTranslateMatrix(transFoot2, О, О, -0.25);
SetTranslateMatrix(transHandl, 0.25, 0.0, -0.23);
SetTranslateMatrix(transHand2, -0.25, 0.0, 0.23);
Этот пример я подготовил для использования в дальнейшем в расчете на то, что человечком можно будет легко управлять, перемещая его в пространстве. Но если на сцене присутствует только одна модель, для оптимизации можно сократить количество операций с матрицами. В самом деле, в этом примере матрица matRot, связанная с глобальной системой координат, может вообще не использоваться: модель можно не вращать и оставить неподвижной, а перемещать точку зрения наблюдателя. Эффект вращения модели останется, а количество операций существенно уменьшится.
И теперь мы можем перейти к разбору заключительного примера - проекта каталога Ех21. Как я уже говорил, это заготовка трехмерной игры: игрок попадает внутрь комнаты, населенной движущимися человечками .
Окружение игрока построено из текстур, накладываемых на треугольники, описание окружающего мира загружается из текстового файла.DirectX.
Читать дальшеИнтервал:
Закладка:
Похожие книги на «Графика DirectX в Delphi»
Представляем Вашему вниманию похожие книги на «Графика DirectX в Delphi» списком для выбора. Мы отобрали схожую по названию и смыслу литературу в надежде предоставить читателям больше вариантов отыскать новые, интересные, ещё непрочитанные произведения.




Обсуждение, отзывы о книге «Графика DirectX в Delphi» и просто собственные мнения читателей. Оставьте ваши комментарии, напишите, что Вы думаете о произведении, его смысле или главных героях. Укажите что конкретно понравилось, а что нет, и почему Вы так считаете.